
ID : 895
Replacing the Encoder Backup Battery
Replace the encoder backup battery according to the procedure below.
1
Prepare a new set of 3 backup batteries for replacement.
Note: Be sure to replace all of three batteries with new ones at one time.
2
Turn the controller power OFF.
3
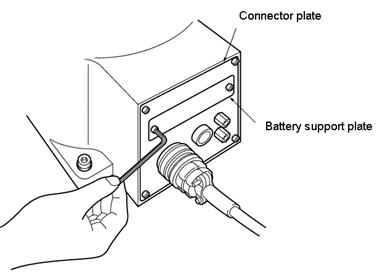
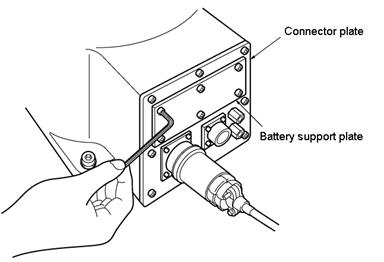
Remove the hexagon socket-head bolts from the battery support plate.
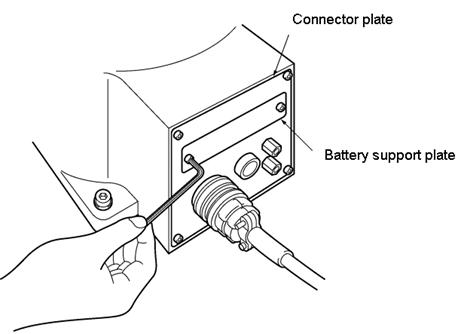
<Standard type (VM-6083, VM-60B1)>
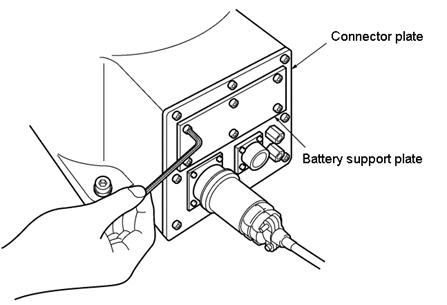
<Dust- & splash-proof type (VM-6083-W, VM-60B1-W)>
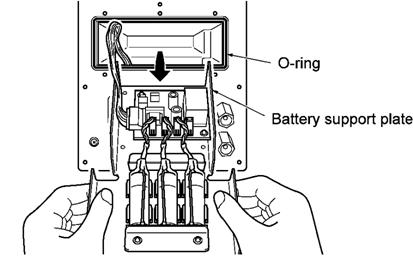
4
Pull out the battery support plate from the robot unit.
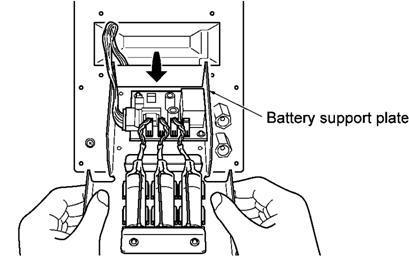
<Standard type ( VM-6083 ,VM-60B1)>
< Dust- & splash-proof type (VM-6083-W, VM-60B1-W) >
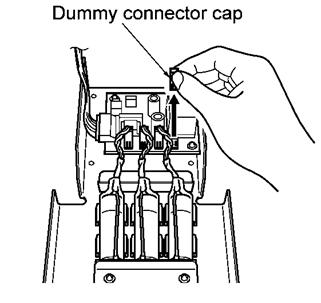
5
Remove the dummy connector cap from the battery board.
6
Connect a new battery (1st one) to the pin from which you have disconnected the dummy connector cap in Step 5.
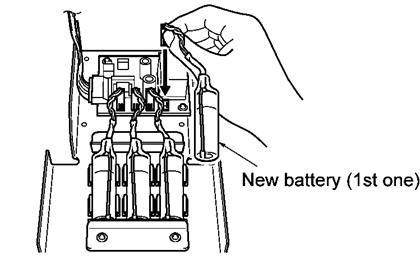
Do not disconnect old backup batteries before connecting a new one to the pin from which the dummy connector cap is removed. If you do so, the encoder positional data may be lost.
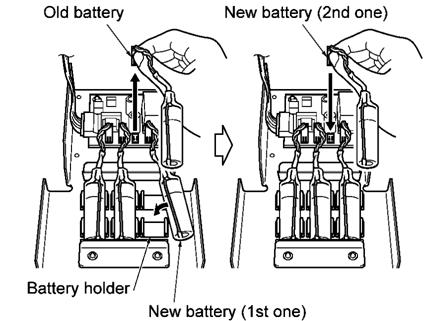
7
Disconnect the old backup battery that is left next to the new battery connected in Step 6, and then connect a new battery (2nd one).
8
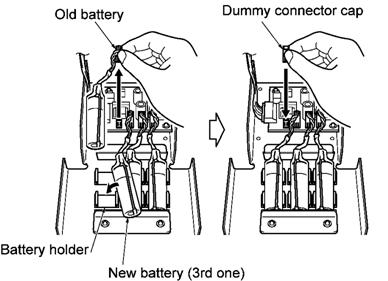
Disconnect the old backup battery that is left next to the new battery connected in Step 7, and then connect a new battery (3rd one).
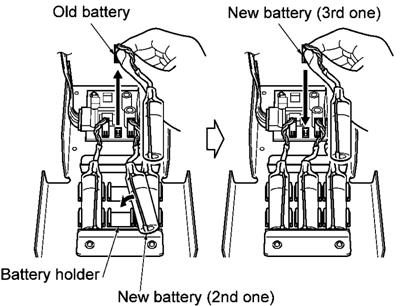
Be sure to replace all of three batteries with new ones at one time. Otherwise, the battery service life will become short.
9
Remove the last old battery and connect the dummy connector cap disconnected in Step 5.
10
Secure the battery support plate to the connector plate.
Tightening torque: 1.6 ±0.3 Nm
<Standard type (VM-6083D, VM-60B1D)>
< Dust- & splash-proof type (VM-6083D-W, VM-60B1D-W) >
ID : 895