
ID : 3214
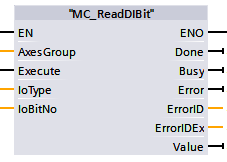
MC_ReadDIBit
To read an I/O input signal of robot controller. (Bit)
| Graphic expression | FB No. | FB category |
|---|---|---|
 |
FB2136 | Non motion |
Input parameter
| Parameter name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| AxesGroup | Integer | 1 or larger | 1 | No |
|
||||
| Execute | Boolean |
|
False | No |
|
||||
| IoType | Integer |
|
0 | Yes |
|
||||
| IoBitNo | Integer |
|
0 | Yes |
|
||||
(*) : For some parameters, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output parameter
| Parameter name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
|
| Value | Boolean |
|
Function description
This function block reads an I/O input signal of robot controller.
The following tables show the correspondence between robot controller port number and bit number.
- Hand I/O
IoBitNo Robot controller port number Robot controller I/O name 0 48 Hand input 1 49 Hand input 2 50 Hand input 3 51 Hand input 4 52 Hand input 5 53 Hand input 6 54 Hand input 7
55 Hand input - Mini I/O
IoBitNo Robot controller port number Robot controller I/O name 0 0 User input 1 1 User input 2 2 User input 3 3 User input 4 4 User input 5 5 User input 6 6 User input 7
7 User input 8 8 User input 9 9 User input 10 10 User input 11 11 User input 12 12 User input 13 13 User input 14 14 User input 15 15 User input
Attention
This function block is available only when the I/O allocation of Mini I/O is "All user I/O".
ID : 3214