Boundless Rotation of Extended-Joints
The boundless rotation function suppresses errors that could occur if an extended-joint keeps on rotating in the same direction.
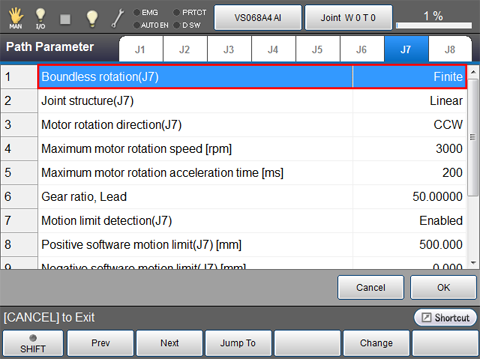
You need to set the boundless rotation parameter to [Boundless] in the path configuration parameters window.
Notes for allowing boundless rotation on extended-joints
-
When an extended-joint is used as a rotary joint, an absolute motion command (DRIVEA or MOVE with EXA option) can drive it within the range of ±360°.
When it is used as a sliding joint, the allowable motion range is ±32768 in the number of motor rotations from the reference position (CALSET position). -
If a movement of a rotary joint exceeding the range of ±360° is commanded, the joint rotates the specified angle and then it automatically returns to the position within the range of ±360°.
This correction operation changes the reference position (CALSET position). Therefore, the Step Back function cannot return the program control back to the steps preceding the change of the reference position. -
When an extended-joint keeps on rotating in the same direction, the current value might jump (overflow) suddenly and greatly.
Performing an absolute motion in this state moves the extended-joint to the position different from the specified one. -
In a boundless rotation motion command, the effective number of digits is 7. If a value exceeding 7 digits is specified, the actual rotation amount will differ from the specified one.
For example
If DRIVE (5, 11111115555) is specified,
11111115555 will be internally interpreted as 1.111111*E+10 so that 5555 will be trimmed due to the definition of a single precision floating point number. - If a large value is specified as the amount of movement at one time in boundless rotation, then the "Out of range" error will occur. The quantum of movement depends on the gear ratio.
-
When an extended-joint is used as a rotary joint requiring positioning, e.g., index table, observe the following instructions.
- For the reduction gear ratio, enter an integer multiple. Entering a non-integer multiple will result in a positioning error after a lot of rotations.
-
If a relative motion command specifies a motion amount using a decimal, the extended-joint could reach the position slightly different from the specified one. Using such a relative motion command repeatedly will result in a positioning error after a lot of rotation.
To avoid such a positioning error, correct the difference from the specified position, for example, using an absolute motion command after completion of one rotation to return the extended-joint to the home position.
- Rotating an extended-joint exceeding ±32768 in the number of motor rotations from the reference position (CALSET position) with the controller power being off will require CALSET operation when the controller is powered on at the next time.
Allowing boundless rotation
Operation Path: Top Screen -[F2 Arm]-[F12 Maintenance]-[F10 Joint Settings]-[F4 Path Parameter]
In the path parameters window, set the Boundless Rotation parameter to [Infinite]. For more details, refer to "Setting the path configuration parameters".