
ID : 10061
Overview of Sample Program
This section describes how to create a program using the smart TP.
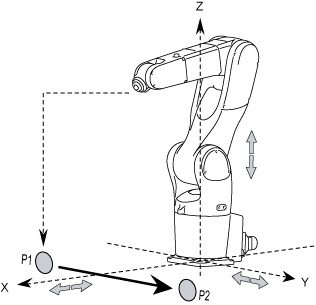
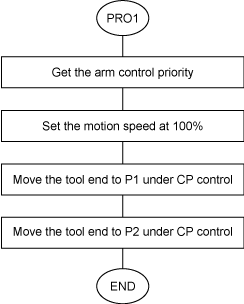
The sample program created in the following sections is for moving the robot arm from the current position to P1 and then P2.
ID : 10061
![]()
ID : 10061
This section describes how to create a program using the smart TP.
The sample program created in the following sections is for moving the robot arm from the current position to P1 and then P2.
ID : 10061