
ID : 3498
Safely-limited Torque (SLT)
Function
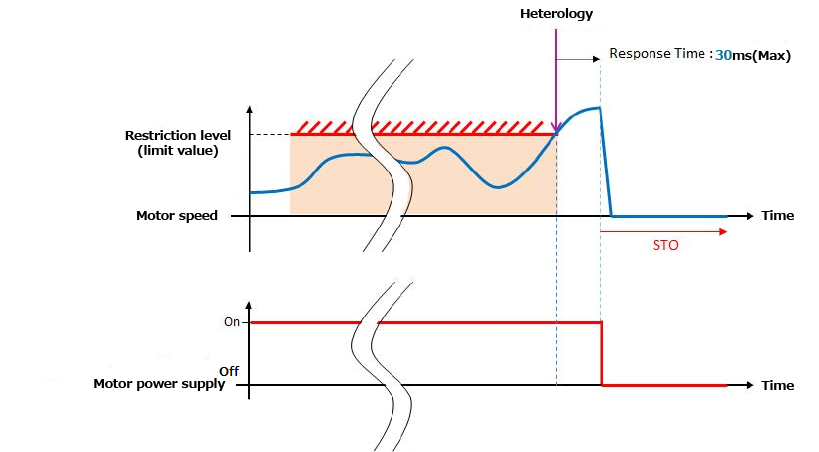
To monitor the torque of each axis and turn the motor power off if a motor speed exceeds the predetermined limit value.
You cannot change the limit value.
Use Conditions
| Input signal / Operation | none |
|---|---|
| Output signal | STO monitor output |
| Monitoring target | Each robot axis |
| Monitoring area setting | none |
| Reaction time | 30 ms (Max) |
| Process Safety Time (PST) | 150 ms |
| Timing to start the function | This monitoring is active always. |
| Axis | Limit value |
|---|---|
J1 |
2.58 [Nm] |
| J2 | 11.48 [Nm] |
| J3 | 5.28 [Nm] |
| J4 | 1.58 [Nm] |
| J5 | 1.17 [Nm] |
| J6 | 0.74 [Nm] |
ID : 3498