
ID : 799
Path Point Registration Function
Path point registration function is used to register position data of multiple path points into a single path data set and save them into the memory. These data sets can be specified for free curve interpolation motion, for example, to allow for a smooth curve movement passing through each position data in the specified order.
20 paths are provided; each path can hold a maximum of 5,000 registered path points.
Path point data registered in these data sets are saved as position type data.
Memory Types for Path Data
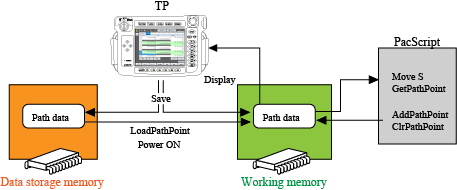
The controller is equipped with two types of memory: data storage memory which holds data when power is off, and working memory which does not hold any data. When the controller is powered ON, all path data stored in the data storage memory is read into the working memory.
To perform free curve interpolation motion, execute the "Move S" command. Free curve interpolation motion uses path data in the working memory.
To dynamically edit path points in PacScript, use the following commands. Note that path data that can be handled through commands in PacScript are restricted to data within the working memory. Path data stored in the data storage memory cannot be edited.
| Command Name | Function |
|---|---|
| LoadPathPoint | Reads in path data. |
| ClrPathPoint | Clears all path points of the specified path. |
| AddPathPoint | Adds path points to the path data. |
Registering Path Data
Use the teach pendant to register path data to the data storage memory. For descriptions of each button displayed on the registration screen, refer to "Path Point Registration Screen."
Precautions when not Specifying the Robot Figure
Path Point Registration Function is the function to establish a path route of the robot
by using positional information, postural information and Information of Robot figures.
If -1, -2 or -3 is specified in FIG of path point, in other word, if robot figure is not set explicitly, the robot behaves as explained below.
Designate with Command or Registration Screen
In AddPathPoint command or Path point registration screen of the teach pendant, if "-1", "-2" or "-3" is specified in FIG of path point,
results will be as shown below.
| Fig=-1 | Replace current robot Fig to that of registered at the time of path point registration. |
| Fig=-2, Fig=-3 | Replace current robot Fig to that of calculated from each axis' angles at the time of path point registration. |
Designation with WINCAPSIII
In editing window of WINCAPSIII, if -1, -2 or -3 are set in Fig of path point and then send it to the controller, results will be as shown below.
| Fig=-1 | Replace current robot Fig to that of registered at the time of path point receiving. |
| Fig=-2, Fig=-3 | Replace current robot Fig to that of calculated from each axis' angles at the time of path point receiving. |
If posture of the robot when receiving the data and when executing program is different, the robot may perform unpredictable motion.
On the Path point registration screen of WINCAPSIII, values of Fig will be displayed as -1, -2 or -3.
Related Terms
Free Curve Interpolation, LoadPathPoint, AddPathPoint, ClrPathPoint, GetPathPoint, CurPathPoint
ID : 799