
ID : 1028
Program Start Reset (Output)
Function
This signal is output to the external device when the robot receives a start signal from the external device and starts to operate.
Usage
- The signal is used to prompt the external device to receive information that the robot program has started to run, and to process subsequent sequence programs.
- The signal is used as a condition to turn OFF the PROGRAM START signal sent from the external device to the robot.
ON Conditions
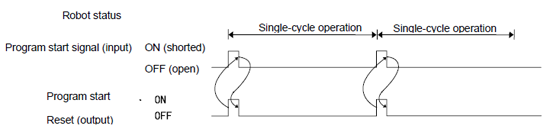
The signal will be turned ON immediately after the robot program starts to run, as shown below.
OFF Conditions
The signal will be turned OFF automatically when the PROGRAM START signal sent to the robot is turned OFF.
Timing Chart
ID : 1028