
ID : 1089
Adjusting the Air Pressure Balance of the Z-Axis (For 4-axis Robots)
Key
[AUX] (Effective in Manual mode)
Operation
HM standard type robot adjusts the air pressure.
H* series robots except HM standard type and XR robots do Gravity Offset Compensation. (Ver.2.2.* or higher)
HM Standard Type Robot
1
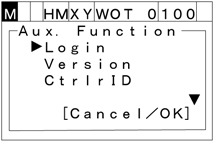
Press [AUX] to call up the "Aux. Function" menu shown below.
2
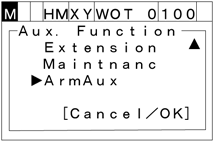
Vertically scroll the screen with the up and down cursor keys to choose the "ArmAux"
3
Press [OK]. The "ArmAux" window appears.
Press [Cancel] to abort adjusting the air pressure balance of the Z-axis.
4
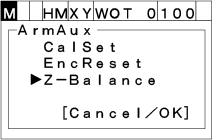
If you choose "Z-Balance" and press [OK], then the "Z-Balance" window appears as shown below.
To abort setting, press [CANCEL].
Adjust the air pressure balance so that the indicator line comes within the OK range of the gauge.
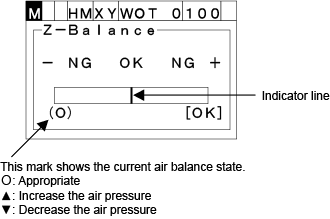
Press [OK] in the state of motor power on. If the motor remains off, a message "Turn ON motor" will appear.
5
Press [OK]. The following screen will appear.
6
Press [OK] or [CANCEL] to complete the air balance adjustment procedure.
H* Series Robots (except HM Standard Type ) or XR Robot (Ver.2.2.* or higher)
Follow the same procedure as HM standard type robot by Step 3.
4
Select "Z-Balance" and press [OK]. "Execute GrvOffset?" appears.
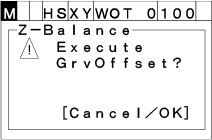
5
Confirm the following notes and press [OK].
- Turn ON Motor.
- The robot fully stops.
- The robot can be moved by external force; that may result in the error.
Press [OK] in the state of motor power on. If the motor remains off, a message "Turn ON motor" will appear.
6
Once Gravity Offset Compensation completed, a message will appear. Press [OK] to complete the air balance adjustment procedure.
ID : 1089