
ID : 1604
Absolute Motion and Relative Motion
Absolute Motion
An absolute motion is a motion to move a taught position.
An absolute motion always moves to a taught position without being affected by the previous motion.
Relative Motion
A relative motion is a motion to move by a taught distance from the current position.
Since a relative motion sets its reference to the current position of the result of executing the previous motion command, the previous motion command affects the motion.
Absolute Motion and Relative Motion Examples
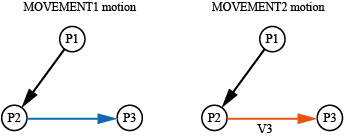
Here are two example programs to move the robot from the current position P1 to point P3 through point P2.
“MOVEMENT1” is expressed with an absolute motion.
“MOVEMENT2” is expressed with an absolute motion and a relative motion. Both programs, when executed, perform the same motion, as shown in the figure below.
Sub MOVEMENT1
TakeArm Keep = 1
'Absolute motion command
Move L, P[2]
'Absolute motion command
Move L, P[3]
End SubSub MOVEMENT2
TakeArm Keep = 1
'Absolute motion command
Move L, P[2]
'Relative motion command
V3 is the relative distance of P2 and P3.
Draw L, V[3]
End Sub
|
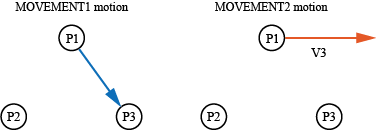
If the first motion instruction “MOVE P, P2” is deleted from “MOVEMENT1” and “MOVEMENT2”, their motions change, as shown in the following figure.
With “MOVEMENT1,” the robot moves to point P3 with an absolute motion, however, ”MOVEMENT2” moves by V3 from the current position with a relative motion.
|
A relative motion executes a movement to a designated relative distance from the current position. Therefore, if a relative motion is executed, right after the motion instruction is skipped with the INTERRUPT ON/OFF instruction, the position of motion finish may change depending on the timing of the ON interruption signal. To fix the motion finish position, use an absolute motion.
ID : 1604