
ID : 1606
Motion Examples of Pass, End and Encoder Value Check
Here are four example programs to move the robot from the current position P1 to point P3 through point P2. They are program examples of pass motion, end motion and encoder value check motion, respectively.
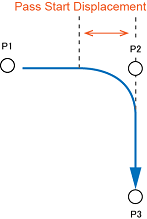
Pass Motion Program Example
Sub PASS_MOVE
TakeArm Keep = 1
Move L, @P P[2]
Move L, @0 P[3]
End Sub
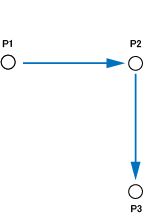
End Motion Program Example
Sub END_MOVE
TakeArm Keep = 1
Move L, @0 P[2]
Move L, @0 P[3]
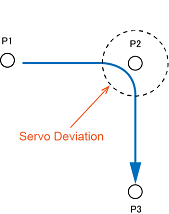
End SubEncoder Value Check Motion Program Example
Check Motion Based on Each Axis' Position
Sub ENCODER_MOVE
TakeArm Keep = 1
Move L, @E P[2]
Move L, @0 P[3]
End SubCheck Motion Based on the Tool End and Robot Arm Figure.
Sub ENCODER_MOVE
TakeArm Keep = 1
Move L, @C P[2]
Move L, @0 P[3]
End SubMotion Examples of Pass, end and Encoder Value Check
| Pass Motion | End Motion | Encoder Value Check Motion |
|---|---|---|
 |
 |
 |
ID : 1606