
ID : 1609
If Pass Motion Effect Reduces
If Non-motion Command is Present after Pass Motion
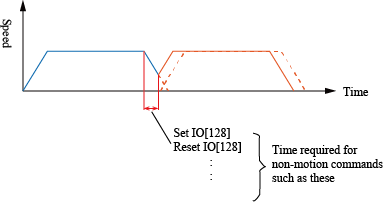
If a non-motion command is present between a pass motion command and the next motion command, the effects of reducing the execution time of the pass motion decrease. A non-motion command is one, which does not let the robot move.
The figure below shows an example of when a non-motion command is present between a pass motion command and the next motion command. In this example, as shown below, the non-motion command is executed during deceleration time of the pass motion command. Therefore, the effects of reducing the execution time of the pass motion decrease.
Sub Main
TakeArm Keep = 1
'Pass motion command
Move L, @P P[2]
'Non-motion command
Set IO[128]
'Non-motion command
Reset IO[128]
' :
' :
'Pass motion command
Move L, @P P[3]
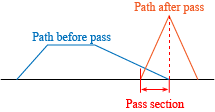
If Path after Pass is Short
If the speed pattern becomes a triangle, due to a short path after pass, the pass start position delays so that pass motion ends after the path deceleration after pass finishes. Therefore, if the path deceleration prior to the pass is small as shown in the figure below, the pass effect decreases.
ID : 1609