
ID : 1611
Pass Start Displacement
Specify “@P” for Pass Start Displacement
Assuming that the distance between the pass start position and the destination position (P1) is “distance L”.
When @P is specified, the next motion immediately starts once the current motion starts deceleration; therefore, the distance “L” varies depending on the speed and acceleration speed. (Pass start position is automatically calculated.)
Move L, @P P1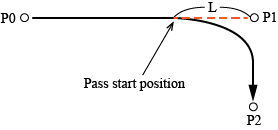
Specify “@number” for Pass Start Displacement
When @number is specified, the robot starts pass motion around [number]mm forward from P1.
Precautions
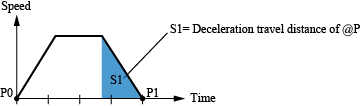
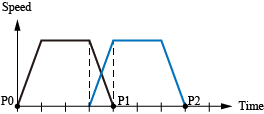
Case1 : The Absolute Value of “@number” is Larger than the “Distance L” of @P
As the figure below shows, the deceleration start position is set forward.
Therefore, if “@number” is used, the travel time becomes longer because the deceleration speed will be slower.
Specify @P |
 |
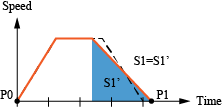
Specify @number. (number > S1) |
Since the deceleration speed decreases, it takes longer to reach to P1 |
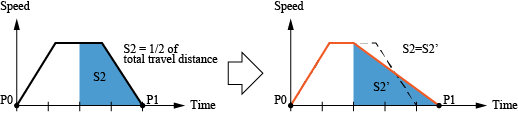
Case2 : The Absolute Value of “@number” is Larger than the 1/2 of Total Travel Distance
In this context, a “total travel distance” expresses the distance between P0 and P1.
Assuming that S2 is the half of the total travel distance, and the absolute value of @number is “x”.
If “x” is larger than S2, the deceleration start position is automatically corrected to S2 at any time. Therefore, even if you change the value “x”, as far as x>S2 is satisfied, the path motion is the same.
Specify @number. (x>S2) |
If the value “x” exceeds S2, the deceleration start position is fixed to 1/2 of travel distance. |
When x>S2, an warning message [Set pass start displacement distance again.] is displayed on the teach pendant.
Acceleration Time
If the deceleration start position varies, the acceleration time of the next motion is corrected accordingly.
As the figure below shows, the operation time of the next motion may be longer compare to @P.
Specify @P Move L, @P P1 |
 |
Deceleration start position changesMove L, @[x] P1 |
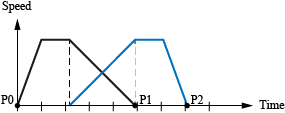 |
The Second Motion has a Triangle Pattern
A triangle pattern represents at motion pattern that the deceleration starts immediately after the acceleration without running in stable speed.
Assuming that the Motion 1 is P0 to P1, Motion 2 is P1 to P2, P1 is Pass point, and the pass start position is specified by @number.
If the Motion 2 has the triangle pattern, the pass motion start position of the Motion 1 is automatically shifted to nearer to the Pass point (P1) than the @number position.
Especially, the pass motion start position is prone to change if the pass motion is done from the lower speed to the higher speed. When you use the pass motion, keep the internal speed and acceleration speed stable as much as possible before and after the pass motion.
ID : 1611