
ID : 1613
Arch Motion
The arch motion control facilitates an effective pick-and-place motion.
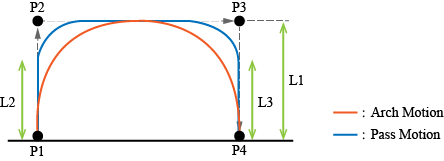
The above figure shows a pick-and-place motion from source position P1 to destination position P4. The pick-and-place motion can be usually accomplished by setting route positions P2 and P3. In the motion, specifying a pass motion in the vicinity of positions P2 and P3 may save the motion time of the arm endpoint.
Unlike a usual pass motion, the new arch motion control allows the arm endpoint to move from anywhere on the Z axis towards the next position, enabling more efficient pick & place motion.
Further, it is easy to program the arch motion control. It is necessary to define only the move distance of the Z axis from P3 to P4 (L1), the distance from P1 to the arch start position (L2), and the distance from P4 to the arch end position (L3).
Be careful with interference with the surrounding facilities when the robot is in arch motion. Under the arch motion control, all robot operations are performed via point-to-point (PTP) moves.
To use ArchMove command.
ID : 1613