
ID : 1941
Mechanical interface coordinates
The mechanical interface coordinates refers to
3-dimensional Cartesian coordinates whose origin is at the center of the flange
surface as shown as show below. The X,Y and Z axis in mechanical
coordinates are expressed as Xm, Ym, and Zm.
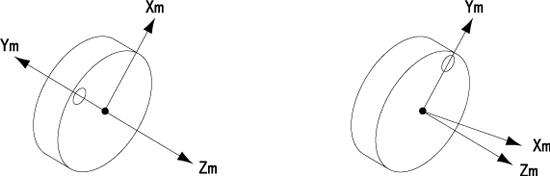
The figure below represents VM robots.
For other robot types, the size of orientation key hole is φ5H7.
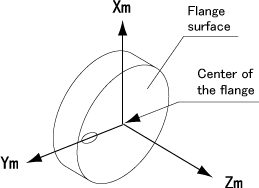 |
Zm: Normal axis on the center of the flange surface Ym: Axis passing through the flange center and orientation key hole Xm: Axis passing through the flange center and crossing Zm and Ym at right angles |
Unlike the work coordinates or base coordinates, the mechanical interface coordinates rotate as the robot flange rotates.
 |
ID : 1941