
ID : 2357
Auto Mode Mutual Monitoring (output)
Function
This signal notifies the external device that the robot is in Auto mode. (dual line) (RC8A only) (Except for Safety I/O less)
Terminal Number
| Signal name | Terminal number |
|---|---|
| Auto Mode Mutual Monitoring 1 | #30 on Mini I/O connector |
Auto Mode Mutual Monitoring 2 |
#64 on Mini I/O connector |
Usage
When you execute "OPERATION PREPARATION" or "PROGRAM START", this signal must be on-state. Refer to RC8A MINI I/O MANUAL, "[NPN type] Safety Circuit of RC8A" or "[PNP type] Safety Circuit of RC8A".
When using the external power source to Mini I/O power supply, if you turn on the power to the robot controller without supplying the external power, or supply the external power after that of the robot, an error may occur and fail to operate the robot as a result.
Be sure to supply the external power before the robot controller will be powered on.
ON Condition
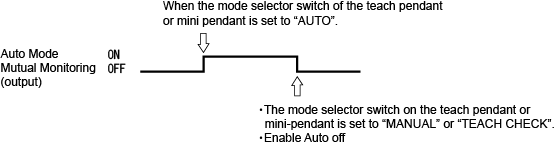
This signal will be turned on when the robot controller enters Auto mode by turning the mode selector switch on the teach pendant or mini-pendant to "AUTO" with the Enable Auto input signal being on.
OFF Conditions
This signal will be turned off when one of the following condition is satisfied.
- The operation mode is switched to the Manual or Teach check mode by using the teach pendant or mini-pendant.
- The Enable Auto input signal is off. The Enable Auto input signal will not be turned off in the pendantless state described in the OPTIONS MANUAL.
The Auto Mode output signal will not be turned off with "INSTANTANEOUS STOP", "STEP STOP" or "CYCLE STOP" commands.
Timing Chart
ID : 2357