
ID : 2500
Safe Torque Off (STO)
Function
This function turns OFF the motor power of the robot unit.
This stop mechanism is equivalent to the stop category 0 of IEC60204-1.
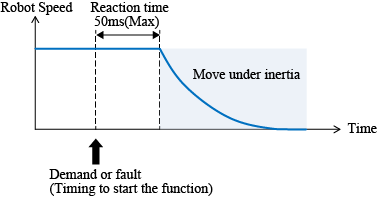
The robot starts moving under its own inertia. The time and distance that is required to complete stop of robot depends on the system's dynamic mechanism and the motion energy.
Use Conditions
| Input signal | none |
|---|---|
| Output signal | STO monitor output |
| Monitoring target | - |
| Monitoring area setting | none |
| Reaction time | 50 ms (Max) |
| Process Safety Time (PST) | 100 ms |
| Operation mode | Auto mode, Manual mode |
| Timing to start the function | Function starts when it is activated by other function. |
ID : 2500