
ID : 2619
[NPN type] User-Input, System-Input and Hand-Input Circuits for RC8A
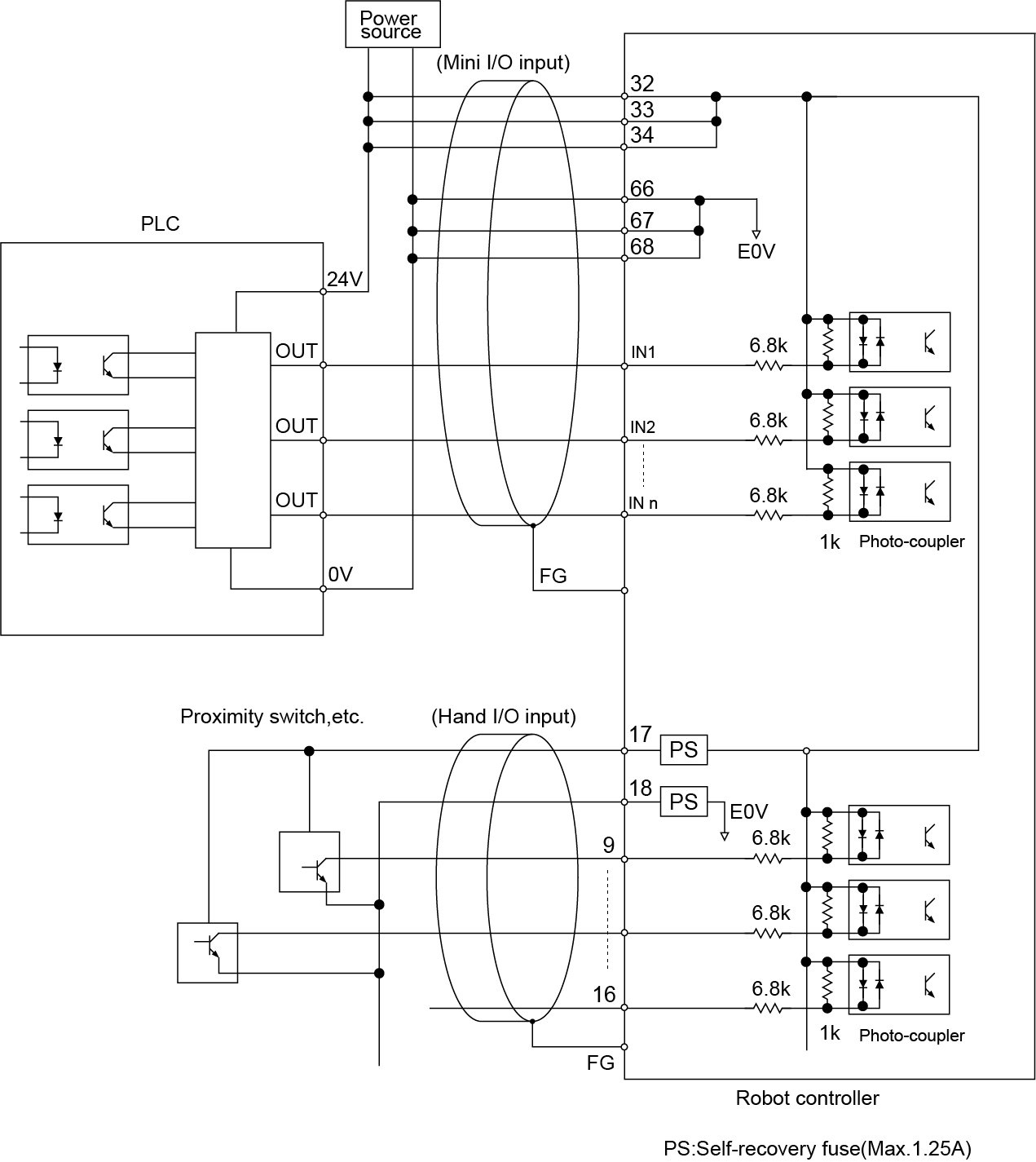
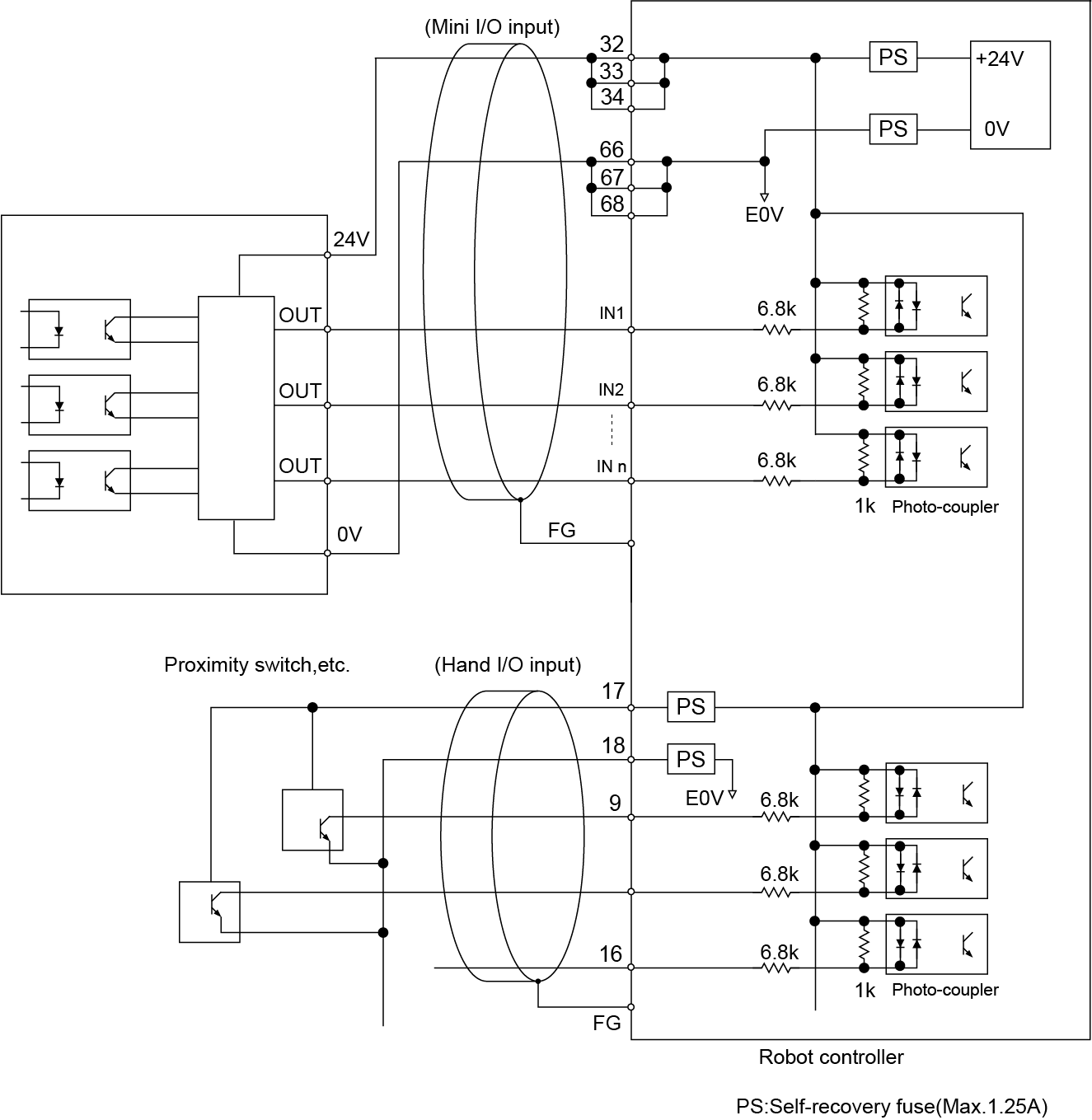
The figure below shows examples of the user-input, system-input and hand-input circuit configurations and connections of the robot controller.
- In addition to PLCs, proximity switches and relay contacts can be directly connected to the input terminals of the robot controller.
- Note that the leakage current from the proximity switches should be 1 mA or below.
- Use multi-core shielding cables for protecting the controller from external noise and ground them at the controller side.
- The maximum allowable capacity for the total of Mini I/O, Hand I/O and Parallel I/O of the internal source is 1.3A. Use the internal source within this allowable range.
When the External Power Source is Used
|
|
When the Internal Power Source is Used
|
|
ID : 2619