
ID : 2682
System Configuration
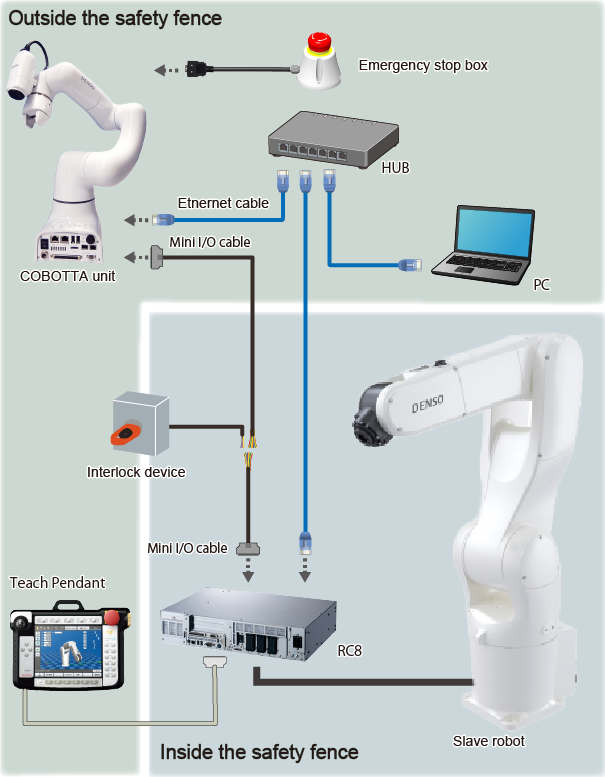
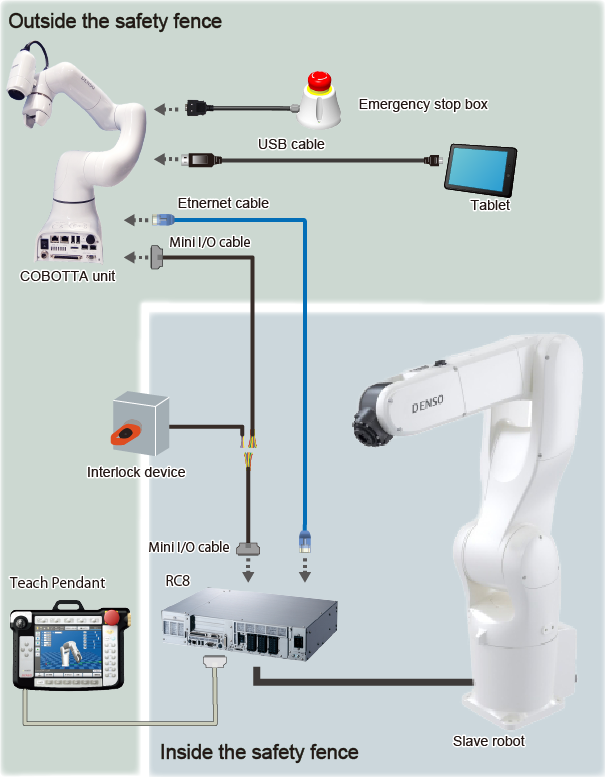
The following shows the system configuration when using the Mirror Control.
Necessary Components
- RC8 series robot controller (software version 2.13.* or higher)
- Slave robot
- License for Mirror Control
- COBOTTA (software version 2.13.* or higher)(*1)
- Emergency stop box (for COBOTTA)
- Mini I/O cable (2 pieces) (*2)
- Teach Pendant
- Ethernet cable (*2)
*1: If the software version 2.12.* is used, please contact our sales representatives.
*2: Please prepare it by customers.
The following are equipment to use to operate COBOTTA. Please prepare either of them.
- PC (To connect, Hub is necessary.)
- Tablet
When Using a PC
When Using a Tablet
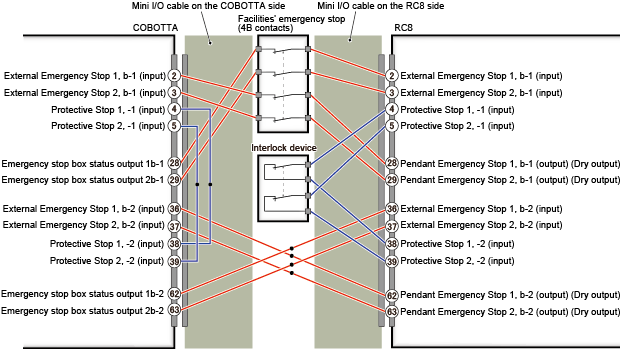
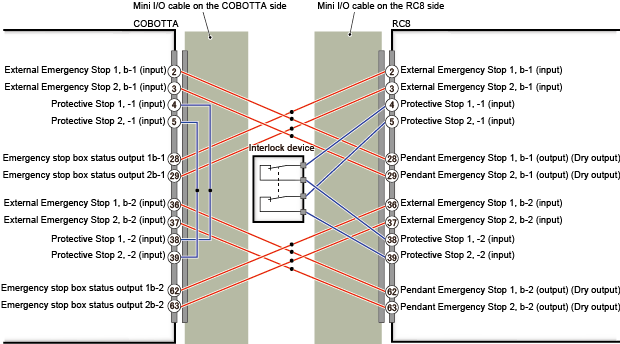
Connect the Mini I/O Cable
Connect the Mini I/O cable to satisfy the following conditions.
- Both the master robot and the slave robot go into the emergency stop state when you press the COBOTTA’s emergency stop box.
- Both the master robot and the slave robot go into the emergency stop state when you press the teach pendant’s emergency stop button.
- The slave robot goes into the emergency stop state when someone steps inside the safety fence (unlocks the interlock device).
In addition to the conditions above, the system configuration should satisfy the following condition when connected to facilities’ emergency stop.
- Both the master robot and the slave robot go into the emergency stop state when you press facilities’ emergency stop.
For the colors of signal lines corresponding to each device’s Mini I/O cable pin numbers, refer to the following user manuals.
RC8 : RC8 Mini I/O Manual "RC8 I/O Allocation"
RC8A : RC8A Mini I/O Manual "RC8A I/O Allocation"
COBOTTA : COBOTTA User Manuals "I/O Allocation(ID:7261)"
When Connected to Facilities’ Emergency Stop
When Not Connected to Facilities’ Emergency Stop
ID : 2682