
ID : 4632
Electrical Wiring and Air Piping of the Robot Unit
Make electrical wiring and air piping for the hand or tool to be attached to the arm end, referring to the either of examples (1) and (2) below.
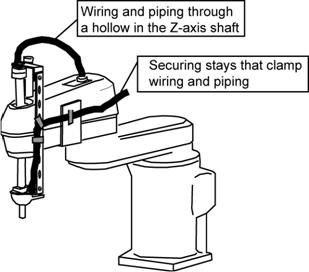
Using a Hollow Provided in the Z-axis Shaft
| Robot model | HM/HMS-40*** series (10 kg payload type) | HM/HMS-4A*** series (20 kg payload type) |
|---|---|---|
| Hollow diameter in the Z-axis shaft | φ17 | φ19 |
Securing Stays to the Robot Unit for Clamping Wiring and Piping
Wiring and Piping Image (HM series)
 |
- Mounting stays may cause those stays, wiring and piping to interfere with the robot unit. If it happens, modify the software limit to decrease the motion range.
- The UL-Listed robot units have a tall 1st arm cover, so take care not to cause that arm cover to interfere with the stays.
ID : 4632
- Related Information
- Notes for Wiring and Piping Through a Hollow in the Z-axis Shaft
- Reference Drawings for Stays that Clamp Wiring and Piping
- Reference Drawing for Stay 1
- Reference Drawing for Stay 2
- Reference Drawing for Stay 3 and 4
- Prohibition Against Use of Mechanical End Bolts and Mechanical Stoppers for Wiring or Piping
- Piping of Source Air
- Adjusting the Air Balance Cylinder