
Pass Start Displacement
If the pass start displacement is designated with "@P," the next motion starts together at the start of deceleration of the motion, which is executed until that time. Therefore, the distance L between the pass start position and passing point B changes depending on the speed and the acceleration.
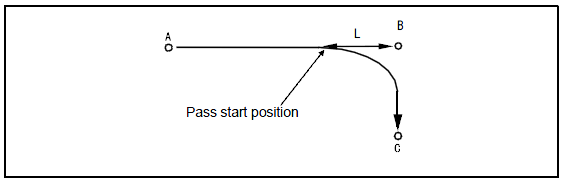
If pass start displacement is designated with "@numeric value," the pass motion starts from an approximate position with a value = L (mm).
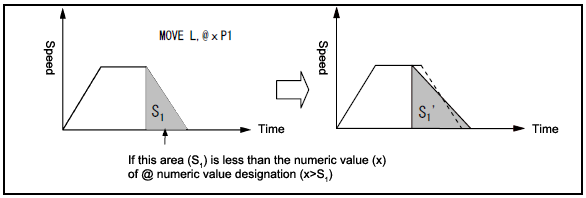
If the value designated with "@numeric value" exceeds the deceleration movement distance, the deceleration start position is corrected as shown below.
Therefore, if designated with "@numeric value," the deceleration is reduced and the movement time may be longer.
If the value designated with "@numeric value" exceeds half of the movement distance, the deceleration start position is fixed to half of the movement distance as shown below.
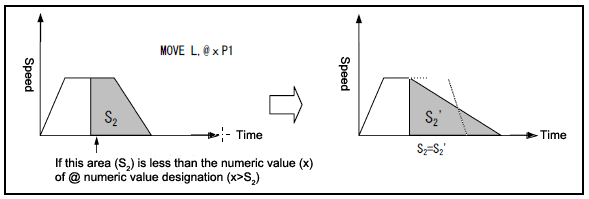
Therefore, when X>S2, the pass motion never changes even if X is changed.
And when X>S2, the "Set pass start displacement distance again" warning is displayed on the pendant.
If the deceleration start position changes, the acceleration time of the next path also changes. As shown below, the motion time may be longer compared with @P designation. 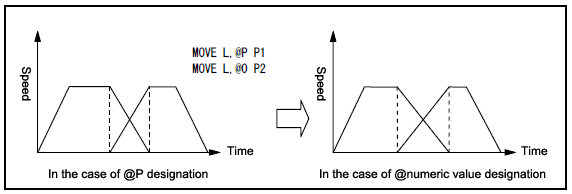
In the following case, even if the pass start displacement is designated with "@ numeric value," the pass motion starts from the position which is less than the position of numeric value = L (mm).
If the Speed Pattern Becomes a Triangle Because of its Short Curve
Similar to "If pass motion effect reduces," the pass motion start position changes. Especially, if the robot executes the pass motion, when the motion changes from low speed to high speed, the pass motion start position may easily change. During the pass motion, use a constant programmed speed and acceleration before and after the pass motion.