
Cooperative Motion
Function Overview
Multiple robots move with keeping the relative position relationship between tool end of respective robot. With this function, you can easily create a program that includes multiple robot operations.
Example:Transporting a Workpiece
Assuming that two robots move a plate-shaped workpiece together. Robots tilt the workpiece at transporting.
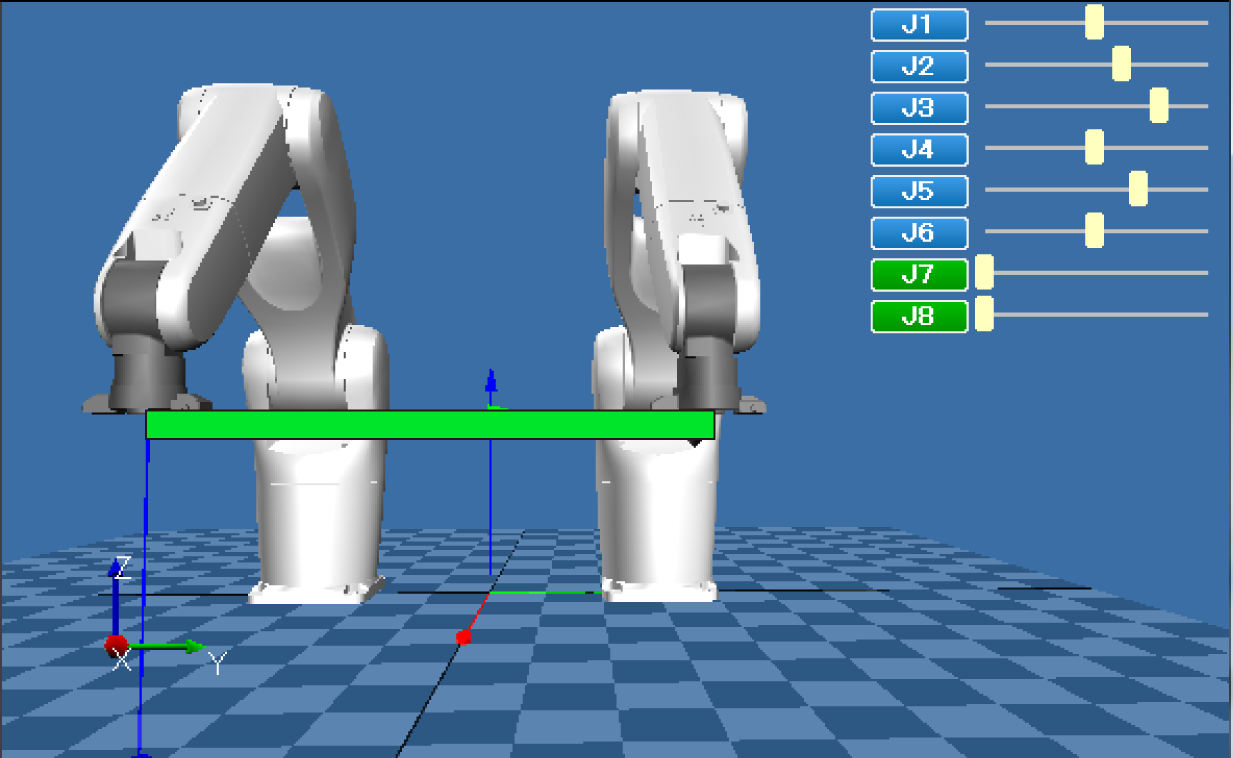
When the Cooperative Motion is Not Used
Since users need to create a program for each robot, it is difficult to realize desired robot motion.
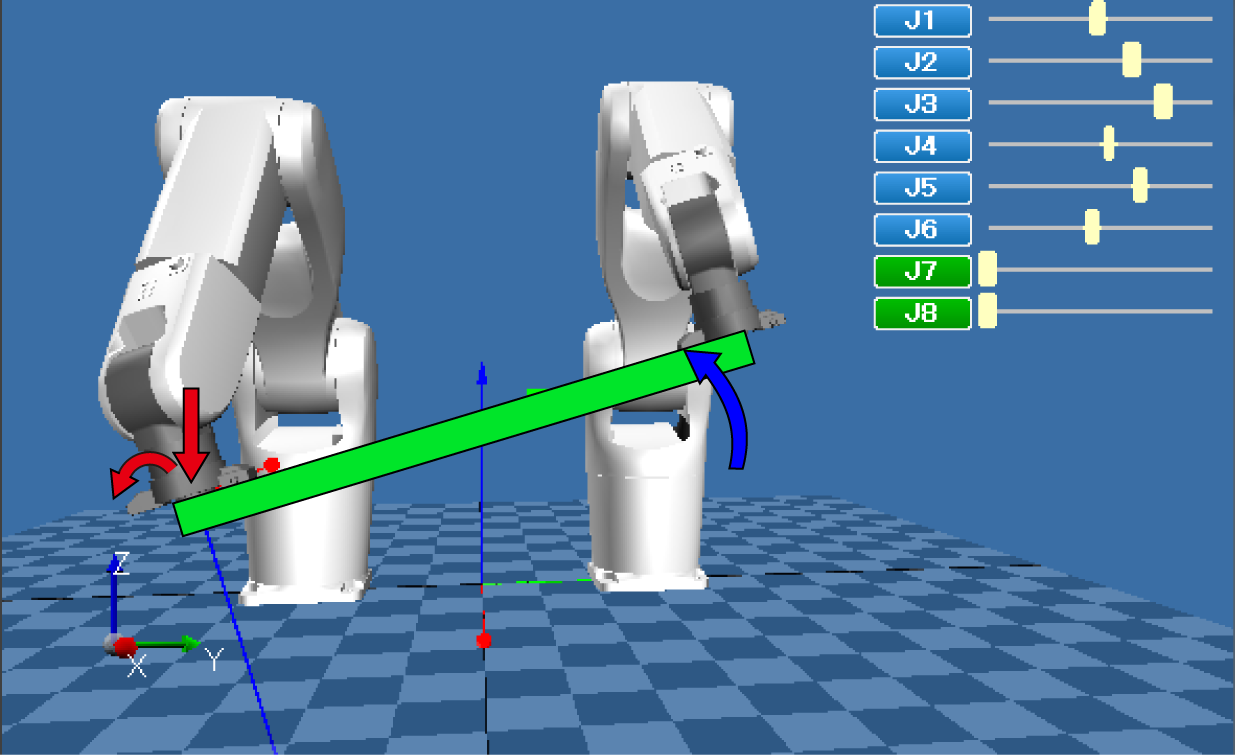
When the Cooperative Motion is Used
Since the follower automatically moves according to the leader's motion, you only have to program the leader's motion. Programming for the follower is not required.
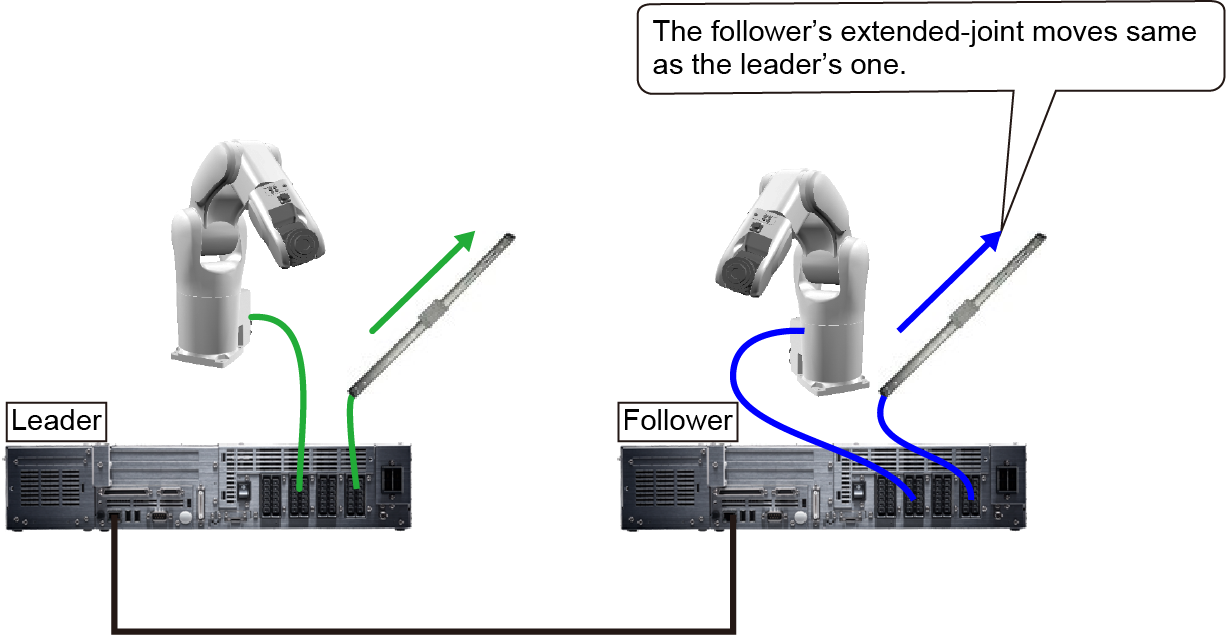
Extended Joint
When extended-joints are used, an extended-joint on the follower moves the same motion distance as that of the leader.
Programming
This motion is specified by SyncMove of motion option.