
System Configuration
System Configuration
Connect motor cables with motor connectors on the MC8 directly, as shown below. Encoder cables are connected to the MC8 through the encoder HUB.
The SLOT number of the motor connector to be connected with the motor cable is designated before shipment.
The allowable combination of the controller's axes and motor types is printed in the label on the top of the controller. Please check that before establishing connections.
- For precautions on connections, refer to "Connecting Cables to the Robot Controller" on the "Extended-joint Manual".
- The total length of an encoder cable for each axis between a connection port of the encoder HUB and a connection port of the motor shall be 16meter or less. The total length of a motor cable of each axis between a connection port of the controller and a connection port of the motor shall be 16meter or less. The total length of all axes is 96m at the maximum.
- For safety reason and to prevent damage to the devices, disconnect the power cable of the controller or shut down the power supply to the controller from the facilities before disconnecting or connecting cables.
- The contact current may exceed 3.5 mA, depending on the connection condition of the MC8 system.
Before connecting the power cable, be sure to connect a ground wire (green-yellow and 2.5mm^2 or larger size) to the earth terminal at the front of the MC8 system. - Components used in this system are not Dust- & Splash-proof type. These components can not be used in the environment which requires Dust- & Splash-proof type.
Models Except UL-Listed Ones
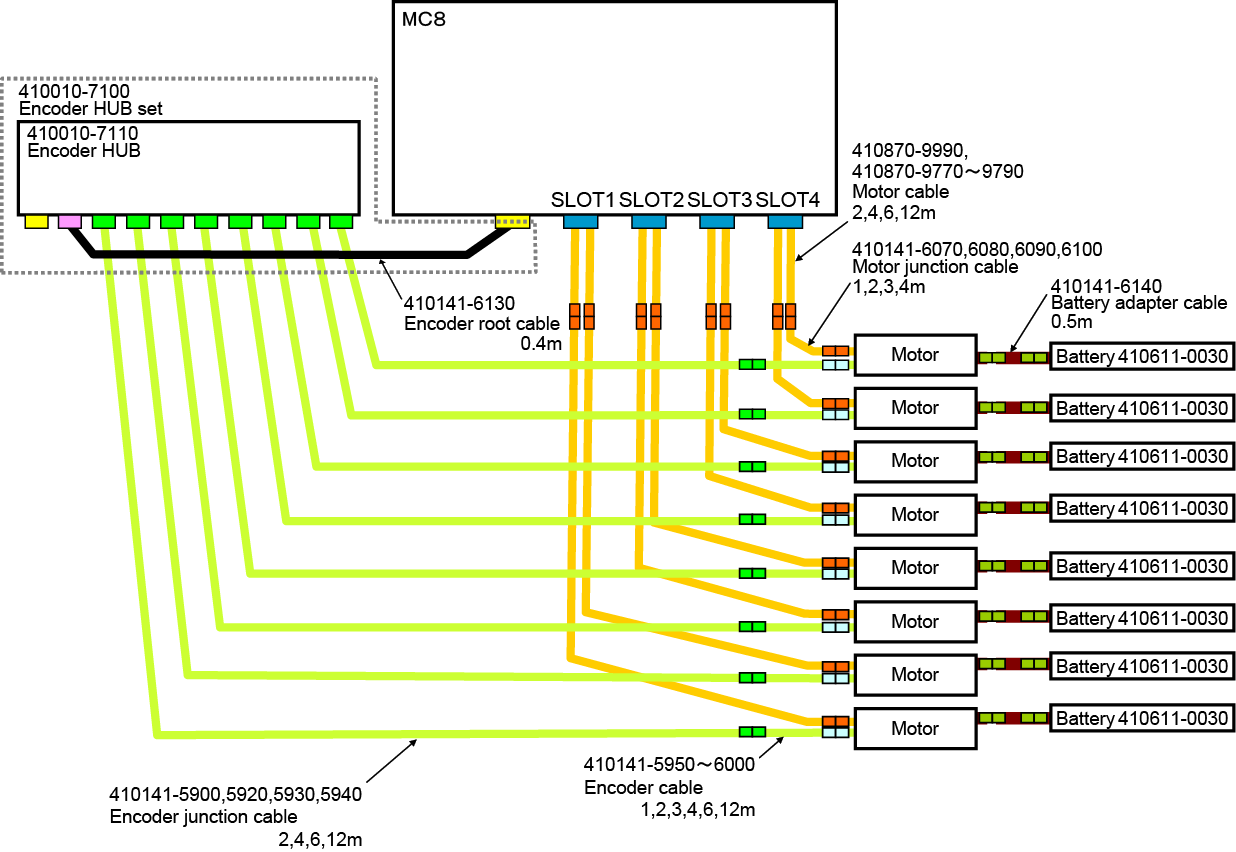
Click on the link to view the magnification. (PDF:375KB)
UL-Listed Model
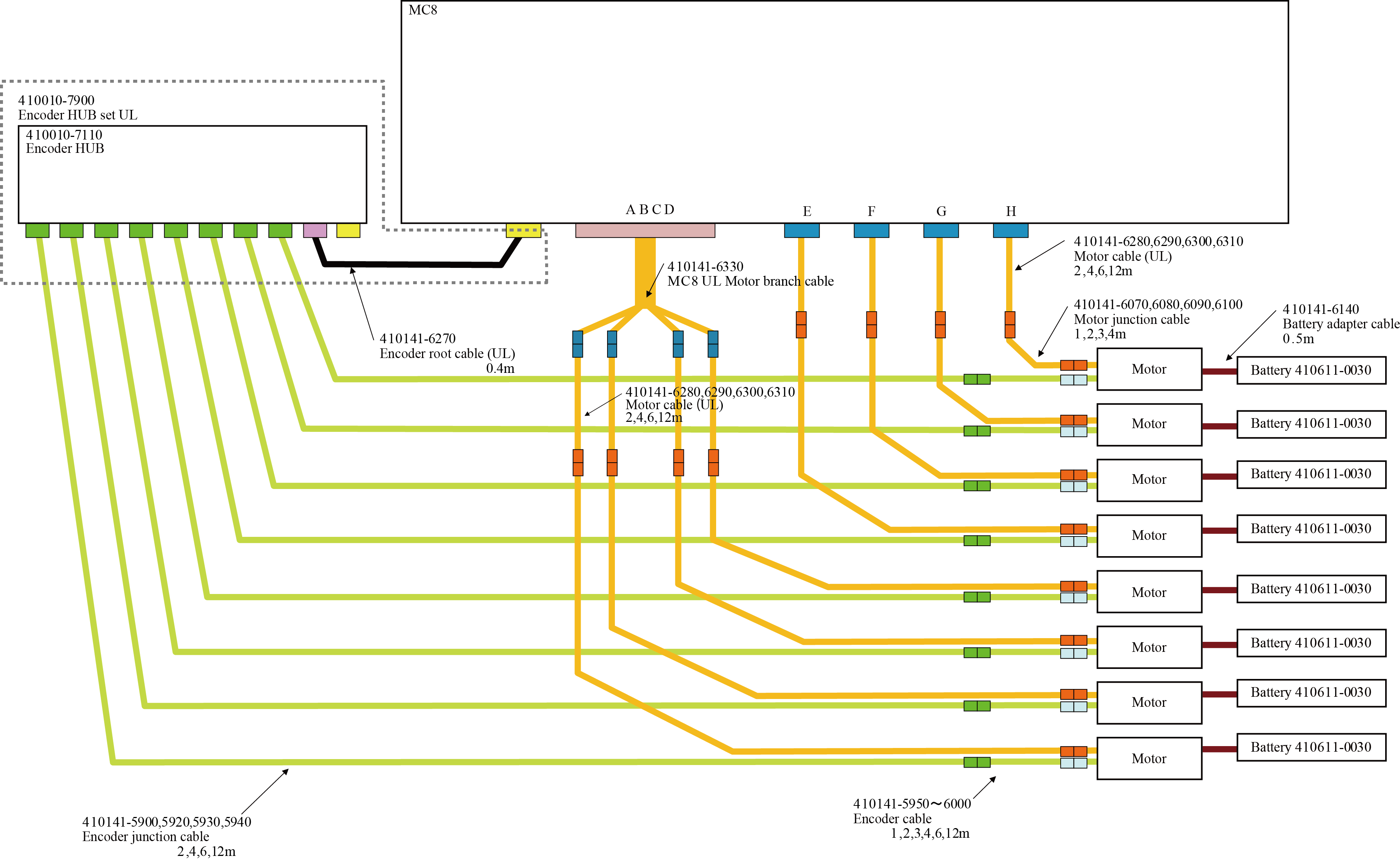
Click on the link to view the magnification. (PDF:1,362KB)
Controller
Names and External Dimensions of the Controller Components
Names and external dimensions of each parts of the MC8 controller is the same as RC8 controller.
For details, refer to "Name of Each Section of Controller" and "Outer Dimensions" on the "RC8 Controller Manual" .
Specification of the MC8 Controller
Specifications of MC8 controller are same as the RC8 controller except for the following items.
For details, refer to "Specification of Controller" on the "RC8 Controller Manual" .
| Item | Specification |
|---|---|
| Allowable input voltage range | Three-phase, 200VAC-15% to 240VAC+10% |
| Control system | CP 3-dimension linear, 3-dimension circular (for Cartesian coordinate robot) |
Drive Capacity of MC8
The motor capacity that can be driven by the MC8 is as listed below.
| MC8 | Motor capacity | Total drive capacity |
|---|---|---|
| 1st to 8th axes | 1000W max./axis | 3000W max. |
Use AC servomotors specified in this manual. The total drive capacity does not change even when optional extended-joints are in use.
Errors at the Robot Operation
When errors occur at the robot operation (overload, excessive deviation, BUS under voltage), adjust the following items, or follow the instructions of "the error code list"
- Increase the waiting time before and after the robot motion.
- Reduce speed or acceleration.
Encoder HUB
The encoder HUB is the same as the one used for the extended-joint support controller.
For details, refer to "Encoder HUB" on the "Extended-joint Manual" .
Motor
Available AC servomotors on the MC8 are the same as that used for the extended-joint support controller.
For details, refer to "Engineering Design of Servo Mechanism" , "Choosing AC Servo Motors" on the "Extended-joint Manual" .