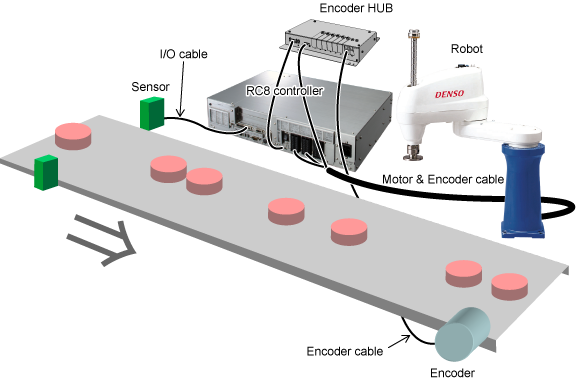
System Configuration of the Sensor Tracking
Configuration of the sensor tracking is illustrated below.
The sensor tracking system is applied to pick up workpieces which are placed linearly (but with arbitrary interval) on the moving conveyor.
The system executes two different programs simultaneously; one is a program to recognize the position of a workpiece and the other is a program to pick it up.
In a program which recognizes workpieces, the sensor activates trigger on once a workpiece passes through the sensor, and then the controller receives the encoder data and stores it at that moment.
In a picking up program, based on the stored data, the robot picks up a workpiece by adjusting the robot arm in response to the workpiece's motion.
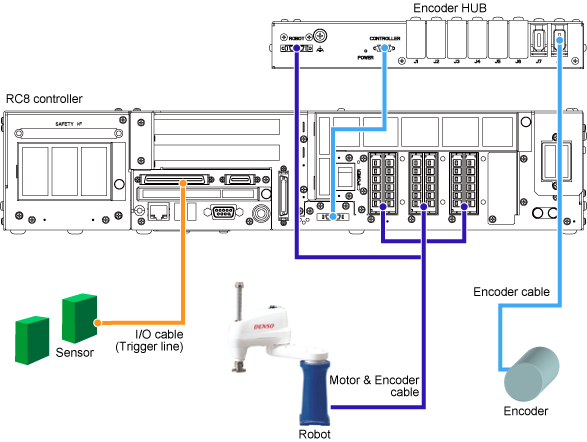
Wiring diagram
Wiring diagram is illustrated below.