
ID : 3495
Safe Torque Off (STO)
Function
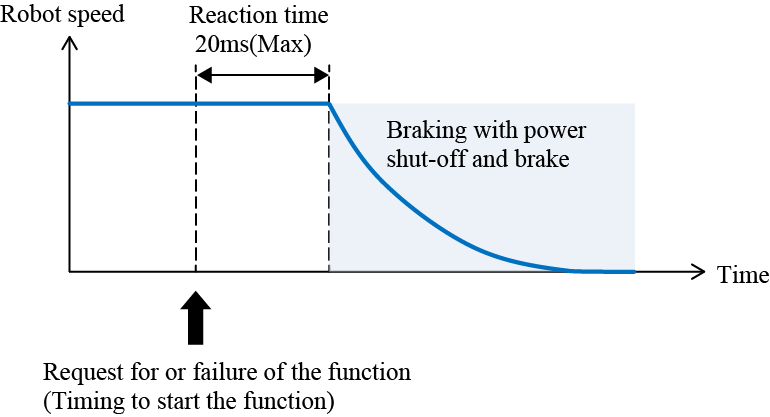
This function turns off the motor power of the robot unit.
This stop mechanism is equivalent to the stop category 0 of IEC60204-1.
The robot starts power shut-off operation. The time and distance that is required to complete stop of robot depends on the system's dynamic mechanism and the motion energy.
Use Conditions
| Input signal | none |
|---|---|
| Output signal | STO monitor output |
| Monitoring target | - |
| Monitoring area setting | none |
| Reaction time | 20 ms (Max) |
| Process Safety Time (PST) | 150 ms |
| Timing to start the function | Function starts when it is activated by other function. |
ID : 3495