
System Configuration
In this system, multiple controllers that connect one robot for each are used.
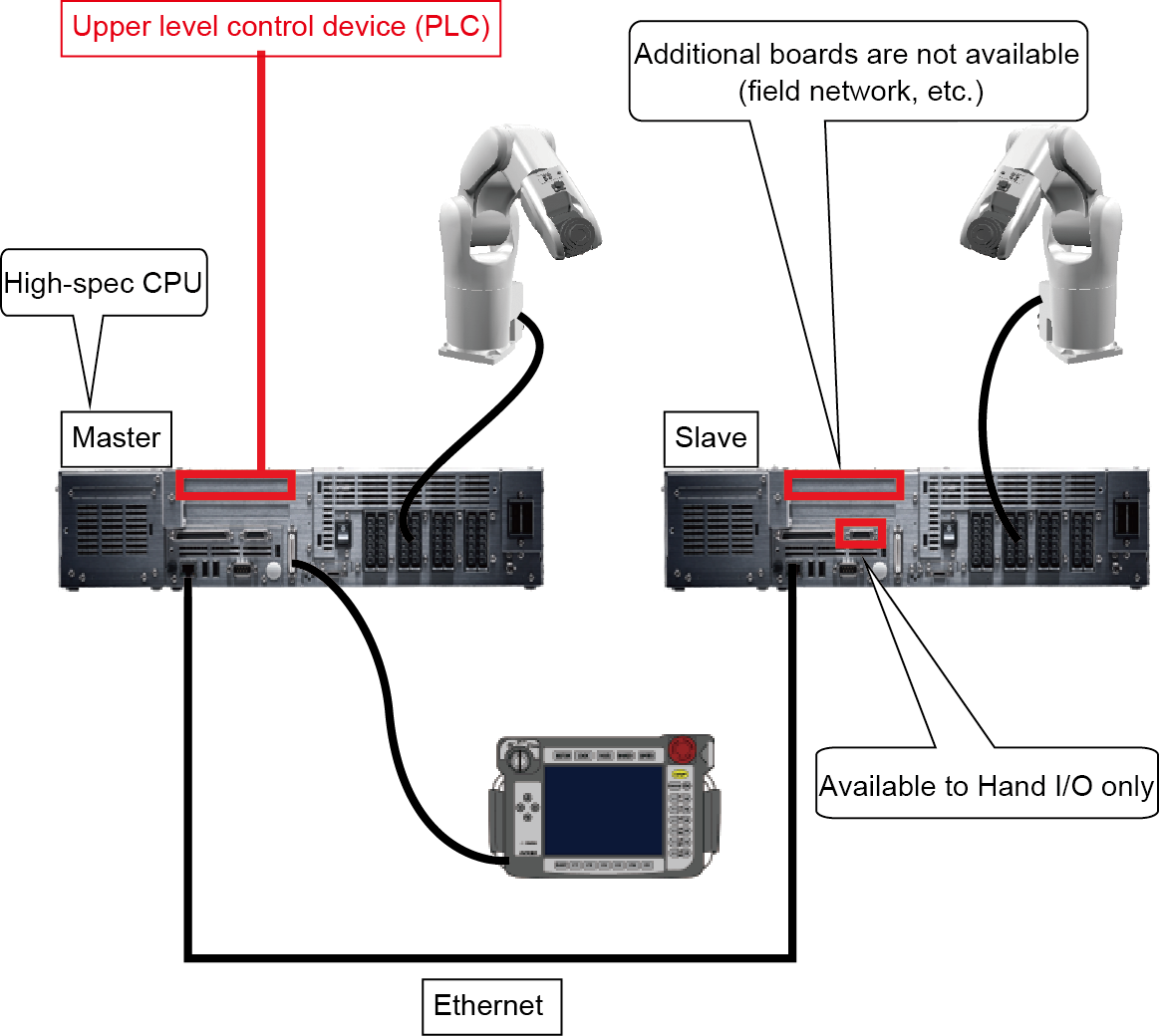
One robot controller is designated to the master controller and the rest of them are designated to the slave controllers. Programming and command execution are carried out by the master, whereas the slaves follow instructions from the master to control robots being connected.
At present, only one slave controller is available.
Connect the master controller with slave controllers through LAN cable.
- The connection can be established through a HUB. If you use a HUB, please prepare the one that has enough communication capability and confirm that the cooperative control function works properly by using actual robots. There may occur an error, depending on the operation condition.
- If any other devices are connected to the HUB, confirm that the cooperative control function is not affected by the devices by using actual robots. There may occur an error, depending on the operation condition.
A teach pendant should be connected to the master controller.
If the teach pendant is connected to the slave controller, you cannot use it once the cooperative control function is activated after the initial setting completion.
Install a dummy connector in the pendant connector after removal of the teach pendant; otherwise, you cannot release emergency stop.
Except for the safety-related signals achieved by Hand-IO or by hardware, connect all IOs only to the master controller.
Use a shielded LAN cable of category 6 or higher.
The additional measures against noise, such as ferrite core and others, could be required depending on the condition. Please check your operation environment.
System Requirements
| Item | Master controller | Slave controller | Additional description |
|---|---|---|---|
| Software version | 1.9.* or higher | 1.9.* or higher | The master and slave controller should be the same version. (Refer to the "Other Precautions".) |
| CPU | i7(High-spec CPU) | No limitation | |
| Standard specification / Safety-IO less specification |
Both specifications are available. | Both specifications are available. | ・The master and slave controller should be the same specification.
|
| I/O | No limitation | Available for Hand I/O only | |
| TP | Available | Not available | In the slave controller, TP is available only for the initial setting, and it will be disabled once the cooperative control function is enabled. |
| External device | Available (communication data size is limited) | Not available | Force sensor and Conveyor tracking are not supported. |
| WINCAPSIII | Available | Available only for the Data reception/sending | |
| User program | Executable | Not executable | Programs for the slave controllers are executed by the master controller. |
| The maximum number of controllers | 1 | 1 | |
| License | Paid license | Free license | |
| Robot model | VM-6083 / VM-60B1 VS-6556 / VS-6577 VS050 / VS060 / VS068 / VS087 VP-6242/ VP-5243 HM series/HS series |
Same as the master | ・The master and slave robots don't need to be the same robot model.
・XR- and SC-series are not available. ・MC8 is not available. |
| The extended-joint | Available | Available |