
Function Description
This function includes two types of motion; cooperative motion and synchronous motion.
| Cooperative motion | Two robots move with keeping relative position relationship between the tool end of respective robot.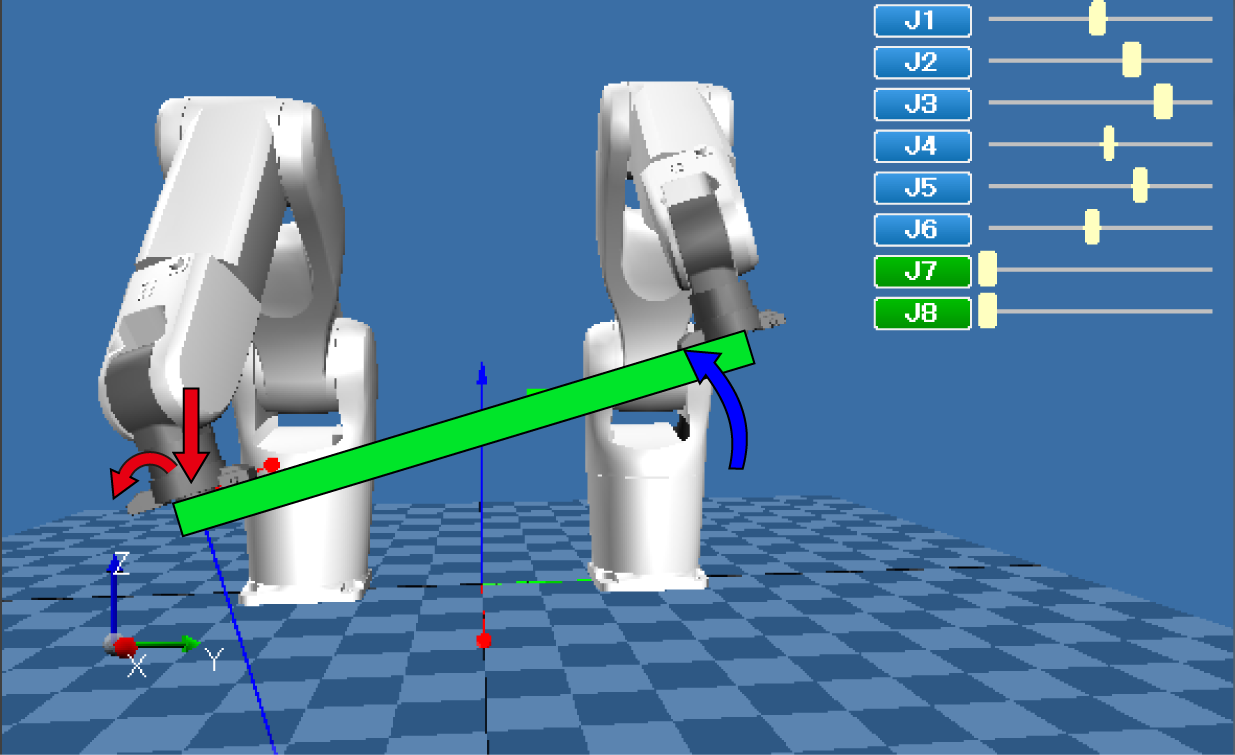
|
|---|---|
| Synchronous motion | Two robots synchronously work together to complete a set of tasks.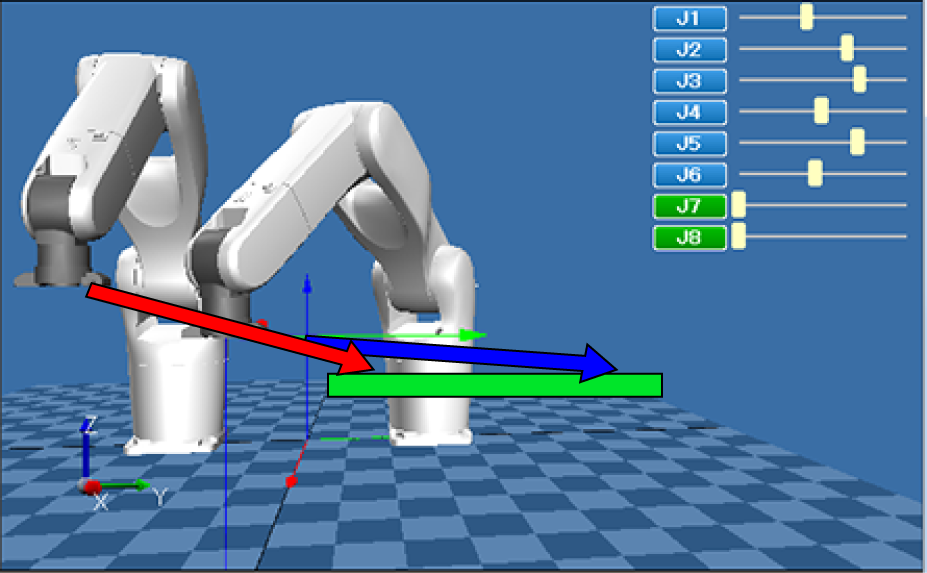
|
Naming of Controller and Robot
To distinguish robots and controllers used in the cooperative control function, following names are given to them.
Master and Slave
Use this terms to distinguish controllers. A robot connected to the master controller and a robot connected to the slave controller are called a master robot and a slave robot, respectively. These may be called a "master" and a "slave".
| Master | A controller to carry out program execution. Programming and position teaching are also performed by this controller. With this controller, you can use a teach pendant, I/Os, and WINCAPSIII to this controller almost without limit. |
|---|---|
| Slave | This controller controls the slave robot by the master controller's instruction. Although a teach pendant is enabled at the initial setting, it will be disabled once the cooperative control function is enabled. The use of I/Os and WINCAPSIII in this controller are limited. |
Leader and Follower
This terms are used when robots perform cooperative motion. You can designate arbitrary robot as a leader or follower in every motion, irrespective of the master and slave.
| Leader | A robot that moves to the specified target position. |
|---|---|
| Follower | A robot that moves according to the leader's motion. |
Robot0, Robot1, Robot2, Robot3
A name used to specify a robot in program. This will be an object name as well.
| Robot0 | Master robot |
|---|---|
| Robot1 | Slave robot 1 |
| Robot2 | Slave robot 2 |
| Robot3 | Slave robot 3 |
At present, Robot2 and Robot3 are not available.
- Related Information
- Cooperative Motion
- Synchronous Motion
- World Coordinate System
- Multi Robot