System Configuration
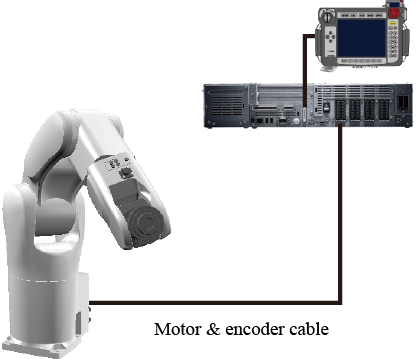
If a single robot is used in a system, the system consists of a controller and a robot as the following figure shows. There is no communication with an external device.
If two or more robots are used in a system, use Cooperative control function in order to prevent collision between robots.
For about the system configuration of the cooperative control function, refer to System Configuration of COOPERATIVE CONTROL FUNCTION GUIDE.