
Calibration
Outline
Calibration measures the exact positional relationship between the conveyor, vision sensor, and robot.
The calibration result is stored as the parameter shown below and used when performing the conveyor tracking operation.
Each conveyor needs to be calibrated respectively.
Parameters Related to the Positional Relation between Robot and Conveyor
| Parameter name | Description |
|---|---|
| Conveyor CALDATA(X, Y) | Rotating angle around the Z axis of the base coordinate that shows the motion direction of a conveyor [rad] |
| Conveyor CALDATA(Z) | Inclination seen from the XY plane of the base coordinate that shows the motion direction of a conveyor [rad] |
| Conveyor Feed Rate | Amount of conveyor movement per one rotation of encoder [mm/rev] |
| Encoder Rotation Direction | Rotational direction of encoder when the conveyor is moved from upstream to the downstream (1: Normal, -1: Reverse) |
Parameters Related to the Positional Relation between Robot and Vision Sensor
Camera parameter and default posture of holding the work are stored.
Between Ver.1.11.* or lower and Ver.1.12.* or higher, different storage format is used when performing calibration.
Also, in Ver.1.11.* or lower, different storage format was used by sensor tracking and by vision tracking.
The result of calibration performed by Ver.1.12.* or higher cannot be used with a controller of Ver.1.11.* or lower.
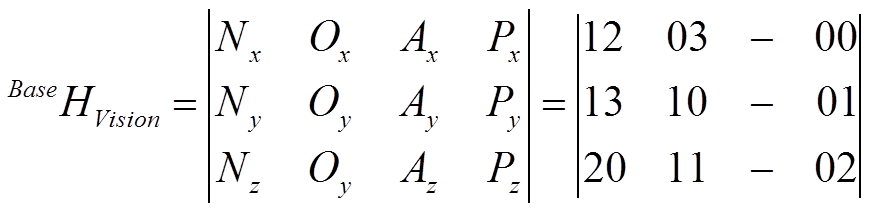
Ver.1.11.* or lower
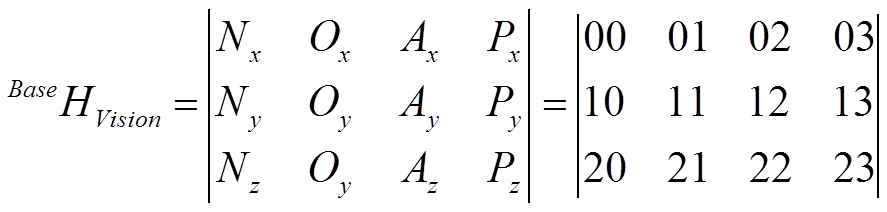
Ver.1.12.* or higher
| Parameter name | Description |
|---|---|
| Conveyor Base Position Rx | RX of default posture of holding the work [deg] |
| Conveyor Base Position Ry | RY of default posture of holding the work [deg] |
| Conveyor Base Position Rz | RZ of default posture of holding the work [deg] |
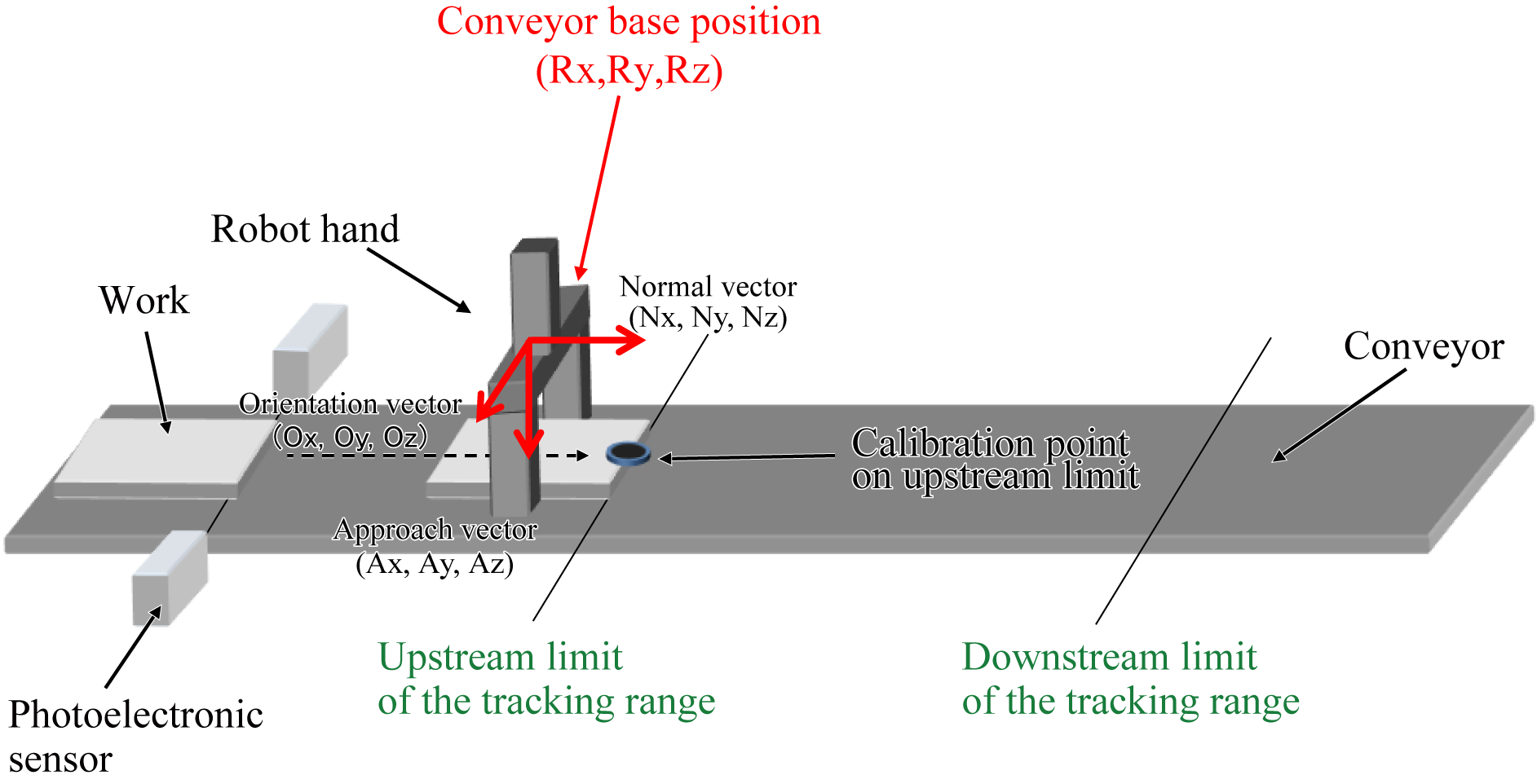
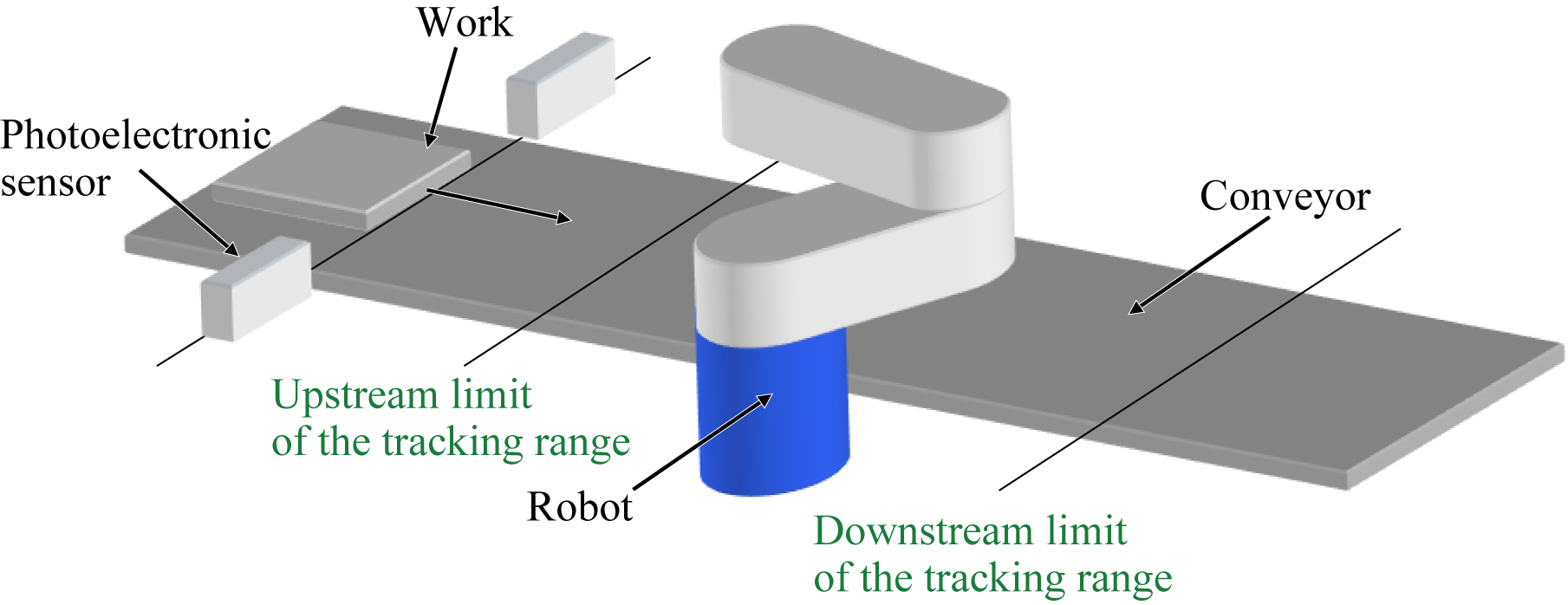
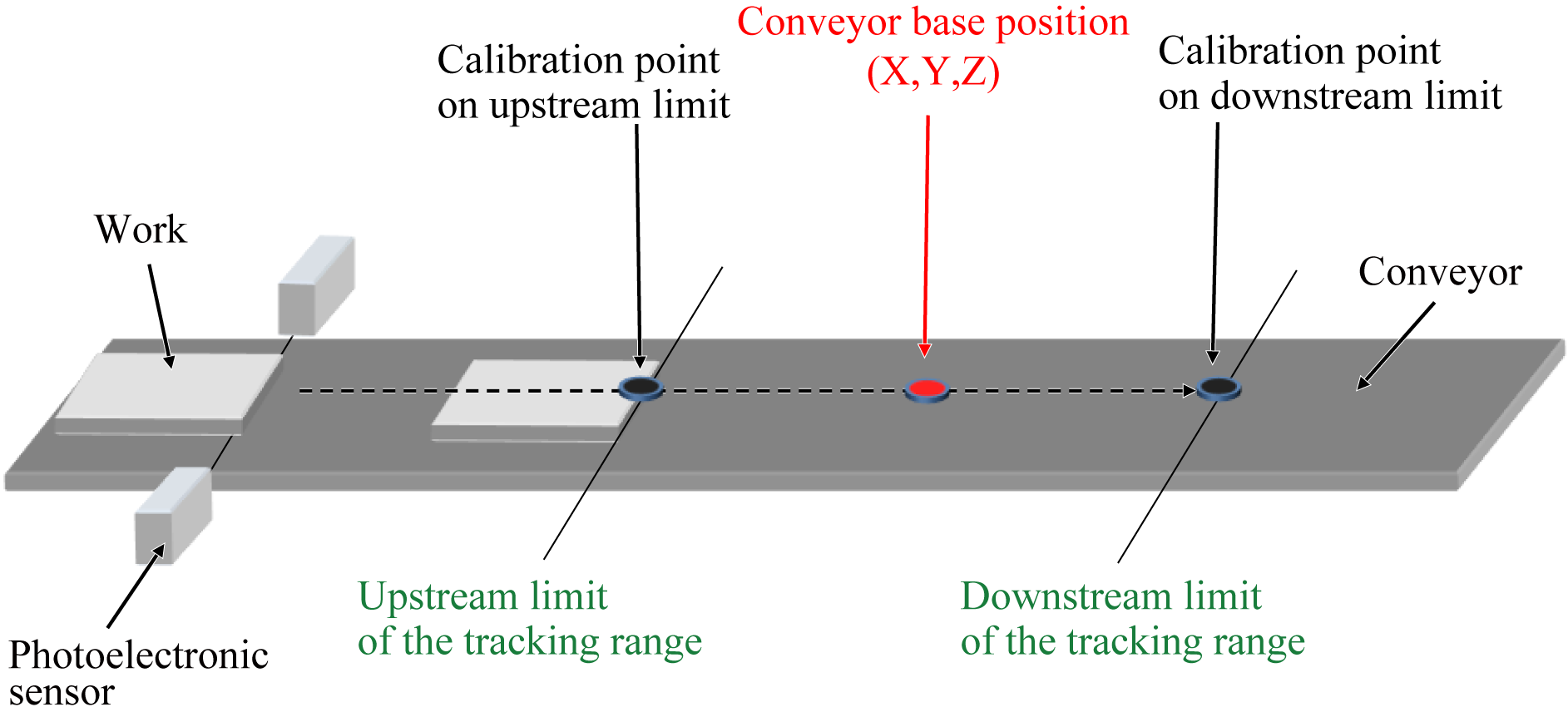
Parameters Related to the Tracking Range
| Parameter name | Description |
|---|---|
| Upstream limit of the Tracking range | Once a work piece passes this limit, a robot starts the conveyor catch-up motion. [mm] |
| Downstream limit of the Tracking range | Once a work piece reaches this limit, robot stops the conveyor catch-up motion and starts deceleration. [mm] |
| Parameter name | Description |
|---|---|
| Conveyor Base Position X | Midpoint X between the calibration point on upstream limit and the calibration point on downstream limit [mm] |
| Conveyor Base Position Y | Midpoint Y between the calibration point on upstream limit and the calibration point on downstream limit [mm] |
| Conveyor Base Position Z | Midpoint Z between the calibration point on upstream limit and the calibration point on downstream limit [mm] |
- Related Information
- Calibration Procedure for the Conveyor
- Parameter Setting