
ID : 10601
Assembling Procedure to 4th Axis

1
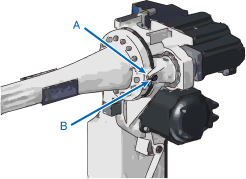
Remove the protective components from the vicinity of notch (A)(B).
2
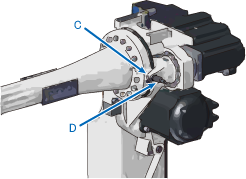
By using the smart TP, move the robot axis to the CALSET position and make the notch (C) and the notch (D) closer.
3
Assemble the dial gauge holder to the hole beside the notch (D).
4
Insert the dial gauge (E) to the holder.
Push the dial gauge in for about 2.5 mm.

This completes assembling.
ID : 10601