
ID : 11010
Précautions d'Installation
Assurer un Environnement d'Installation Approprié
Les types standard et salle blanche ne doivent pas être installés dans les environnements présentant les caractéristiques suivantes :
- atmosphère inflammable, explosive ;
- matériel acide, alcalin ou corrosif ;
- présence d'inverseurs de grande taille, d'émetteurs haute fréquence, de contacteurs de grande taille, de machines à souder ou d'autres sources de bruit électrique ;
- il est possible qu'il soit immergé dans le liquide ou exposé à des éclaboussures d'eau,
- présence de copeaux métalliques ou d'autres matériaux conducteurs volatiles ;
- présence de brouillard ;
- présence de pollution conductrice.
- il peut être soumis à des radiations.
- extérieur.
Espace d'Entretien
Le robot et les équipements périphériques doivent être installés de sorte à laisser un espace suffisant pour effectuer les formations, maintenances et inspections en toute sécurité.
De plus, l'ergonomie doit être prise en compte pour l'installation de l'équipement afin de ne pas exercer de tension sur le corps de l’opérateur.
Dispositifs de commande en dehors de l'espace de restriction du robot
Le contrôleur du robot, la console d'apprentissage et la mini-console doivent être installés en dehors de l'espace de restriction du robot, à un emplacement d'où il est possible d'observer tous les mouvements du robot et de manipuler ce dernier facilement.
La console d'apprentissage et la mini-console doivent être installées de sorte qu'il est possible de distinguer chaque combinaison d'interrupteurs d'arrêt d'urgence et d’observer le robot afin d'éviter d'appuyer sur les interrupteurs d'arrêt d'urgence erronés en cas d'arrêt d'urgence.
Pour éviter toute mauvaise utilisation, conservez correctement la console d’apprentissage et la mini-console qui ne sont pas connectées.
Position des jauges
Les jauges de pression, d'huile et autres doivent être installées à un emplacement facilement accessible.
Protection des câbles électriques et des tuyaux hydrauliques/pneumatiques
- S'il existe un risque d'endommagement des câbles électriques et des tuyaux hydrauliques/pneumatiques, protégez ces derniers à l'aide d'un cache ou d'un objet semblable.
- Veillez à ne pas appliquer une pression trop importante sur le joint.
Le câblage électrique ou les tuyaux hydrauliques/pneumatiques doivent être installés de sorte que les mains et les pieds de l’opérateur ne soient pas coincés.
Résistance de terre
La résistance de terre de l'alimentation du robot ne doit pas dépasser 100 Ω.
- Vérifiez la tension d'alimentation avant de mettre le robot sous tension. Si vous appliquez une tension incorrecte, vous risquez de provoquer un incendie.
- Vérifiez la connexion de la mise à la terre avant de mettre le robot sous tension. Si la mise à la terre n'est pas connectée, cela peut provoquer un choc électrique.
Position des interrupteurs d'arrêt d'urgence
Pour arrêter immédiatement le fonctionnement du robot dans une situation d'urgence, installez un interrupteur d'arrêt d'urgence à une position qui satisfait aux exigences suivantes de la norme ISO 13850.
- Où l'opérateur peut facilement opérer
- À proximité du bouton de démarrage du programme
Vérifiez que tous les interrupteurs d'arrêt d'urgence installés fonctionnent correctement.
Faites en sorte que l'interrupteur d'arrêt d'urgence qui n'est pas connecté ne soit pas placé dans un endroit où il peut être actionné.
Position des indicateurs d'état de fonctionnement
Les indicateurs d'état de fonctionnement doivent être positionnés de sorte que les employés peuvent facilement savoir si le robot est temporairement interrompu, en arrêt d'urgence ou en arrêt anormal.
Précautions lors du transport et de l'installation de l'unité du robot
- Utilisez une grue d'atelier, un engin de levage ou un transpalette d'une capacité adaptée et actionnés par un personnel qualifié pour cette opération.
- Passez les câbles de levage au travers des boulons à œil spécifiés. Si vous les faites passer par un autre emplacement, l'unité de robot risque de tomber, de se casser ou de blesser quelqu'un.
- Les travailleurs doivent porter un équipement de protection (casque, chaussures de sécurité, lunettes de sécurité, gants).
Si vous transportez un robot et un contrôleur de robot d’une manière contraire aux consignes spécifiées par DENSO, cela peut entraîner des blessures corporelles graves, voire la mort en cas de chute ou de basculement.
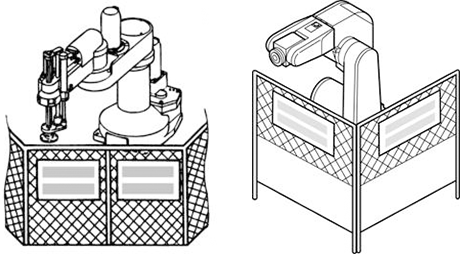
Installation d'une Clôture de Sécurité
Les barrières de sécurité doivent être conçues et installées en se basant sur les réglementations associées (y compris les notifications, notices et directives associées) et les normes associées (telles que les normes ISO 12100 et ISO 10218-2) après avoir effectué l'évaluation des risques.
Précautions lors de l'installation (exemple)
- La structure de la barrière de sécurité doit seulement pouvoir être retirée avec un outil.
- La résistance de la barrière de sécurité ne doit pas être endommagée/déformée par la force externe du robot.
- La sortie/entrée de la barrière de sécurité doit être spécifiée. La structure de la barrière de sécurité doit être construite de telle sorte que toutes les personnes incluant les opérateurs ne puissent pas entrer dans la barrière de sécurité depuis tout endroit autrement que par la sortie/l'entrée (ceci afin d’empêcher l’escalade de la barrière et d’entrer par l'ouverture de la barrière).
- L'ouverture de la barrière de sécurité doit être conçue et installée de sorte que les bras et les jambes ne puissent pas atteindre les zones de risque (en disposant correctement le treillage).
- À la sortie/l'entrée de la barrière de sécurité, des dispositifs de verrouillage et/ou des dispositifs de détection de présence doivent être installés.
- Lors d'un test de fonctionnement, avant d'installer la clôture, placez un surveillant à l'extérieur de l'espace restreint du robot et dans une position où il peut voir tous les mouvements du robot. Le surveillant doit empêcher les travailleurs d'entrer dans l'espace restreint du robot et se consacrer uniquement à cette tâche.
Configuration de l'espace de déplacement du robot
L’espace nécessaire à l’exécution des tâches du robot est appelée l'espace de fonctionnement du robot.
Si l'espace de déplacement du robot est plus grand que l'espace de fonctionnement, il est recommandé de définir un espace de déplacement plus petit pour éviter que le robot ne gêne ou ne perturbe d'autres équipements.
Aucune Modification du Robot n'est Autorisée
Ne modifiez jamais l'unité du robot, la commande du robot, la console d’apprentissage et d'autres dispositifs.
Nettoyage des Outils
Si votre robot utilise des pistolets de soudage, des buses de pulvérisation de peinture ou d'autres effecteurs nécessitant un nettoyage, il est recommandé que le processus de nettoyage soit effectué automatiquement.
Éclairage
Installez un équipement d'éclairage approprié pour la zone d'installation du robot (en particulier la zone utilisée pour l'entretien, l'inspection et l'apprentissage).
De plus, assurez-vous que l'éclairage ne génère pas d'autres dangers. (Par exemple, les travailleurs sont éblouis par la réflexion ou le clignotement de l'éclairage)
Si l'éclairage n'est pas approprié, lorsqu'un opérateur effectue une opération (tel que l’apprentissage et entretien, etc.) près du robot, il peut trébucher sur une partie du robot ou la heurter, ce qui peut entraîner des blessures imprévues.
Protection contre les Objets Projetés par l'Effecteur Final
S'il existe un risque de blessure pour les travailleurs en cas de chute ou de projection de l'objet retenu par l'effecteur, tenir compte de la taille, du poids, de la température et de la nature chimique de l'objet et prendre les précautions nécessaires pour assurer la sécurité.
Apposer l'étiquette d'avertissement
Placez l’étiquette d'avertissement ¬fournie avec le robot sur la sortie/l’entrée de la barrière de sécurité ou dans une position où elle est facile à voir.

Affichage des directions de déplacement de tous les axes
Affichez une notice indiquant les noms des axes et les directions de déplacement dans un emplacement visible sur l'unité du robot. Les directions de déplacement doivent correspondre aux directions réelles. Une absence d’indication ou une indication erronée peut entraîner des blessures corporelles ou des dommages matériels en raison d'une utilisation incorrecte.
Modification de la Configuration
Lorsque les composants du système robotique ou des dispositifs en option (y compris le logiciel matériel) ont été modifiés ou ajoutés, effectuez les tests ou les contrôles nécessaires des fonctions de sécurité.
ID : 11010