
ID : 59
6th-Axis CALSET Position (Standard Type Robot, Standard Flange)
For robots equipped with a standard flange, determine the 6th-axis CALSET position using a dedicated CALSET jig. Checking the number of rotations of the axis is not necessary because the 6th axis is a boundless rotation joint.
To setup, follow the process below.
CALSET Jig Assembly
1
Remove the standard-type CALSET pin.
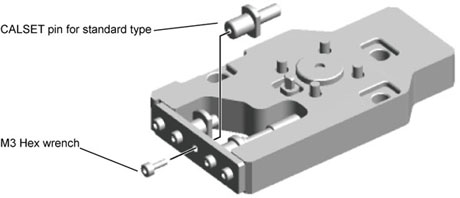
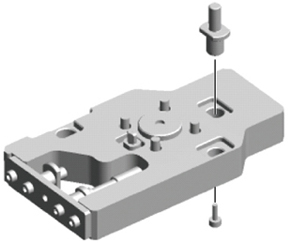
2
Mount the CALSET pin (for standard type) to the place drawing below indicates.
Tightening Torque: 2.0 +/- 0.4 Nm
CALSET Jig Installation
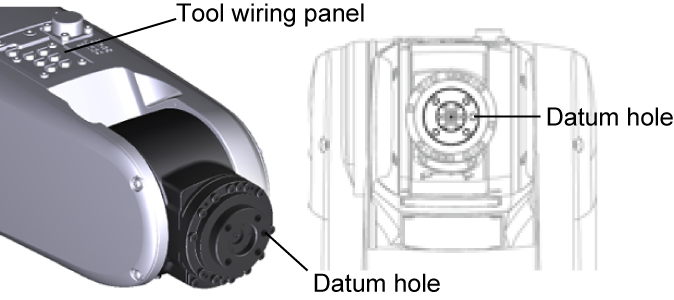
1
Set the 6 axis to the place drawing below indicates. (near the 0 degree)
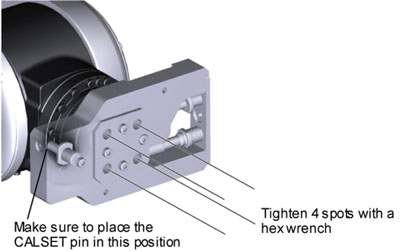
2
Mount the CALSET jig.
Tightening Torque: 8.8 +/- 1.7 Nm
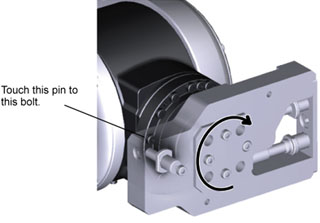
Positioning
Rotate the CALSET jig clockwise, and then touch the pin to the bolt slightly.
ID : 59