
ID : 1964
Position Data
Position data refers to a set of data which includes RX, RY and five components of base coordinates (the work coordinates system if an work coordinates system is defined). Of these five components, three are robot flange center coordinates (the end-effector tip coordinates if an end-effector is defined) and two are current robot attitude components, as shown below.
Position data allows you to represent the current position of the robot flange center and object points.
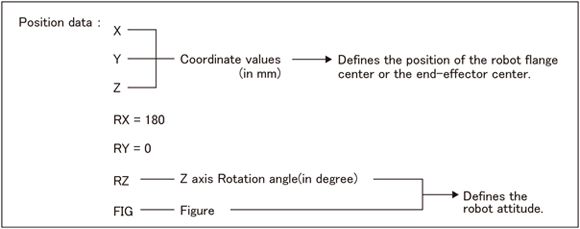
A set of X, Y, and Z coordinate values represents the position of the robot flange center (or tip of the end-effector if defined) expressed in base coordinates (the work coordinates system if an work coordinates system is defined) in units of mm.
The rotation angle expressed by RZ refers to an angle formed by the X axis of the tool coordinates and the X axis of the base coordinates (the work coordinates system if an work coordinates system is defined). The angle is expressed in units of degree. The X-axis of the base coordinate system (or the work coordinate system when it is enabled) that rotates around Z-axis of the base coordinate system corresponds to the X-axis of the mechanical interface coordinate system.
A figure represented by FIG value refers to a figure of robot arm joints. You can not only select a given value, but use the Automatic figure selection function. By using this function, a robot controller automatically selects an appropriate value. For details, refer to "Automatic Figure Selection Function (Auto Fig)".
ID : 1964