
ID : 1968
Shoulder Figure
With the combination of two figures of 4th axis (SINGLE and DOUBLE) and two types of arm figures (RIGHTY and LEFTY), 4-Axis robots can take different figures for one position of end-effector.
| Value | Figures |
|---|---|
| 0 | SINGLE-RIGHTY |
| 1 | SINGLE-LEFTY |
| 16 | DOUBLE-RIGHTY |
| 17 | DOUBLE-LEFTY |
LEFTY ⁄ RIGHTY
| RIGHTY | LEFTY |
|---|---|
|
|
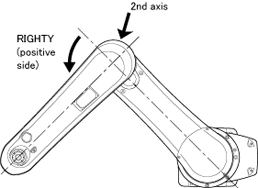
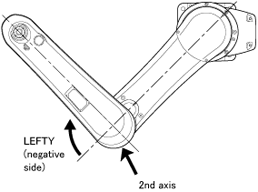
When the floor-mounted robot is viewed from
the top:
If
the 2nd axis is positioned at the positive side on the X axis of the base
coordinates the figure is called "RIGHTY";
if at the negative side is called "LEFTY."
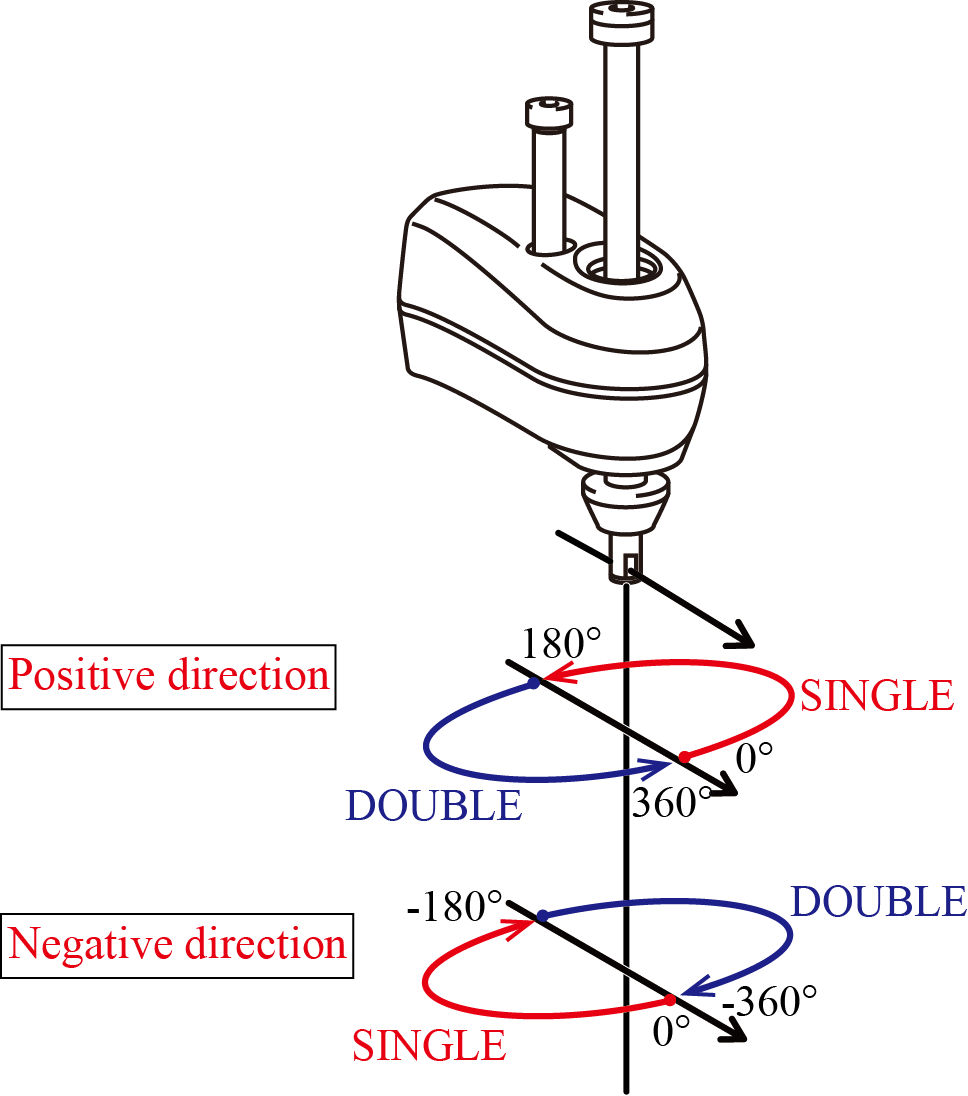
SINGLE ⁄ DOUBLE
If the rotation angle (θ4) of the 4th axis is within the range of -180°<θ4≤180° around the Z axis in mechanical interface coordinates, the figure is SINGLE; if it is within the range of 180°<θ4≤360° or -360°<θ4≤-180°, the figure is DOUBLE.
ID : 1968