
ID : 2786
Correcting Robot Position Data
There are three ways to correct robot position. Select a way suitable for your operation condition.
Note that you cannot select any selection buttons unless the reference positions have been registered.
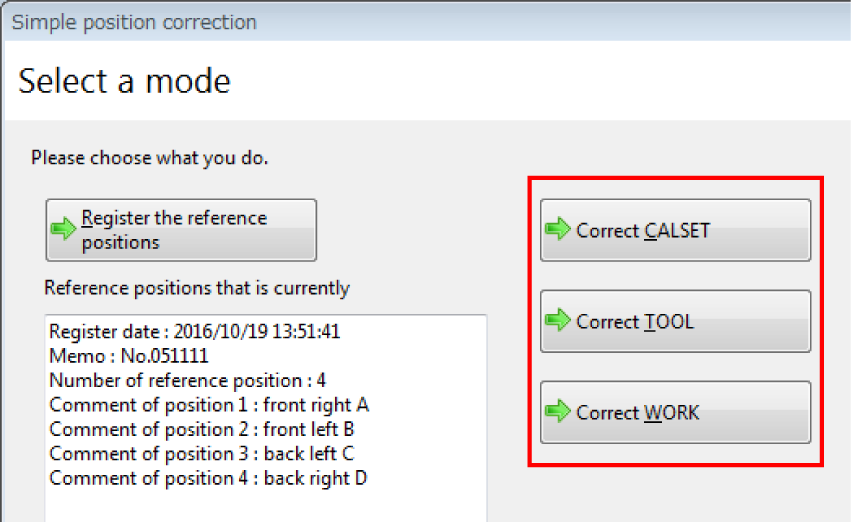
Correct CALSET
Correct position deviation caused by the motor replacement.
Correct TOOL
This allows you to figure out the tool setting value when you install a new tool. Also, with this function, you can correct the robot position when the tool end is swerved or deformed.
Correct WORK
When you change the robot installation position, this function enables to correct the work coordinates that have been registered in the original robot position according to the travel distance and angle from the original position. Users can correct registered several work coordinates at the same time.
ID : 2786
- Related Information
- Correct CALSET
- Correct TOOL
- Correct WORK