
ID : 2856
Terminology and Definitions
- Tracking mode
- "Tracking mode" means a state that the circular tracking is enabled.
Calling circular tracking-dedicated commands ("TrackAbsApproach", "TrackAbsMove", "TrackApproach", "TrackDepart", "TrackMove" and "TrackDraw")
while the circular tracking is enabled will allow robots to follow the target position according to the turntable's motion. - During tracking mode, any deceleration caused by the exclusive control, SS2, RSM are not available.
Doing so, the robot will stop with an error.
The combination use of the exclusive control and circular tracking is available in version 2.8.* or higher. - Non-tracking mode (Normal operation mode)
- "Non-tracking mode" means a state that the circular tracking is disabled. This is the default setting at the controller startup.
To move a robot arm to a static target position, use motion commands ("Approach", "Depart" and "Move") in this mode.
Executing tracking-dedicated commands ("TrackAbsApproach", "TrackAbsMove", "TrackApproach", "TrackDepart", or"TrackMove" and "TrackDraw") in this mode will cause an error.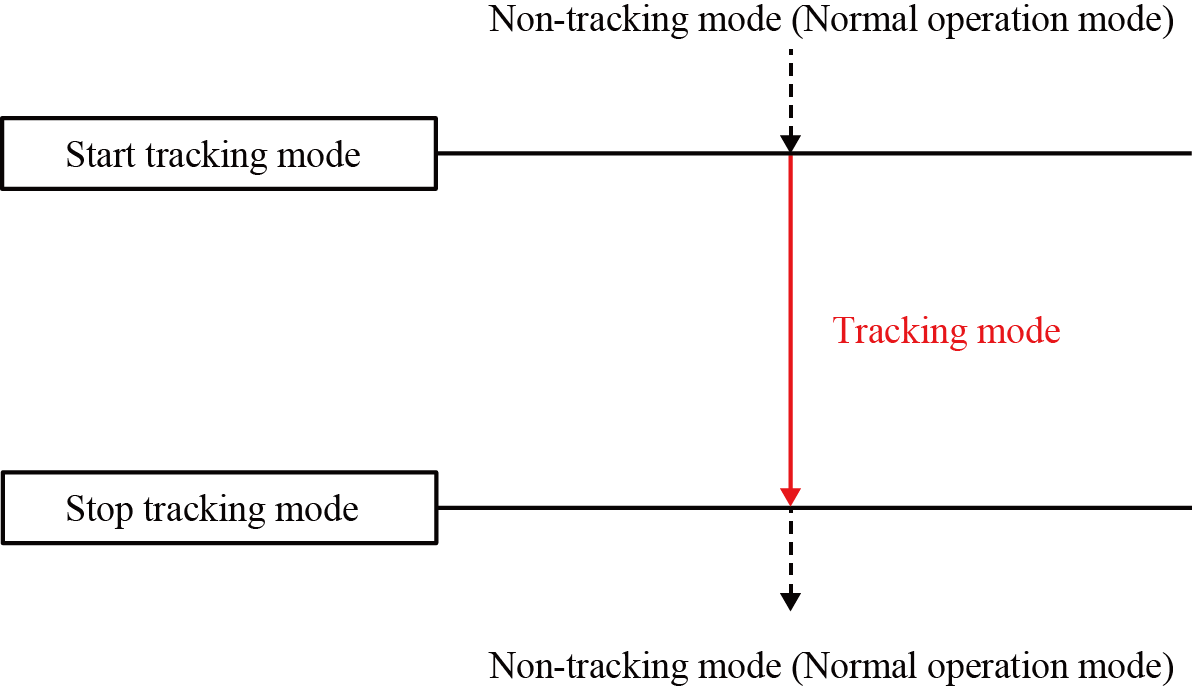
- Catch-up motion
- Catch-up motion indicates a robot motion that catches up to the target workpiece on the turntable.
The robot accelerates its speed until it catches up to the workpiece, and then moves in parallel to the turntable once the robot reaches the workpiece.
- Robot task motion
- Robot task motion is a robot motion that performs actual robot tasks along with the catch-up motion.
For example, a TrackApproach motion is a synthesized motion of the catch-up motion and Approach motion. In this context, Approach motion corresponds to the robot task motion.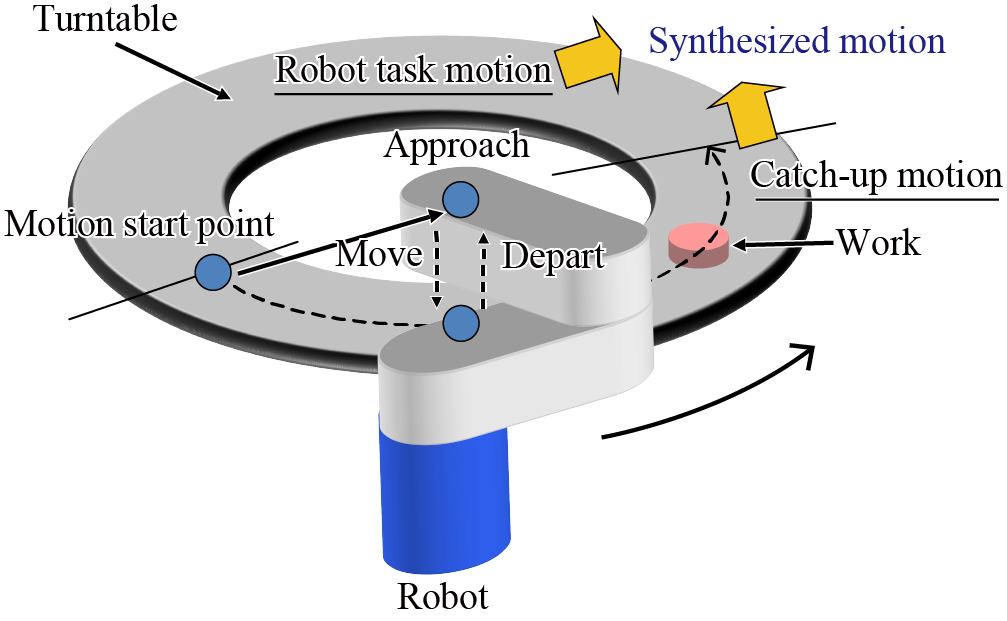
- Tracking buffer
- This indicates the memory storage area that is used to store data with regard to workpieces detected by a sensor or vision sensors.
The following data is stored when a workpiece is registered.Stored values (1) Index value in the tracking buffer (integer type data) (2) Turntable encoder value at workpiece detection (integer type data) (3) Vision sensor detection coordinates (variant type data array) Sensor detection position (position type data) (4) User data (integer type data) (5) Attribute data (integer type data)
- Conveyor vector
- A conveyor vector is a three-dimensional vector whose length is one. This shows the motion direction of a turntable. This is a direction vector viewed from the base coordinate system.
- Tracking-target work
- A tracking-target work indicates a workpiece data that just has been taken out of the tracking buffer and is about to be used for the tracking motion.
This will be the processing object of some commands, such as TrackInRange and TrackArrivalTime.
- Tracking range
- This is an area on the turntable where the robot can perform the catch-up motion.
Tracking range is delimited by the upstream limit and the downstream limit. The upstream limit is set to the direction where a workpiece comes from, whereas the downstream limit is set to the direction where a workpiece goes to. To use multiple robots, set a tracking range for respective robots.
- Upstream limit of the tracking range (Upstream limit)
- This is the tracking limit on the upstream of the turntable. Once a workpiece passes this limit, a robot starts the catch-up motion.
This must be set within the motion range of the robot arm.
- Downstream limit of the tracking range (Downstream limit)
- This is the tracking limit on the downstream of the turntable. Once a workpiece reaches this limit, robot stops the catch-up motion and starts deceleration.
This must be set within the motion range of the robot arm.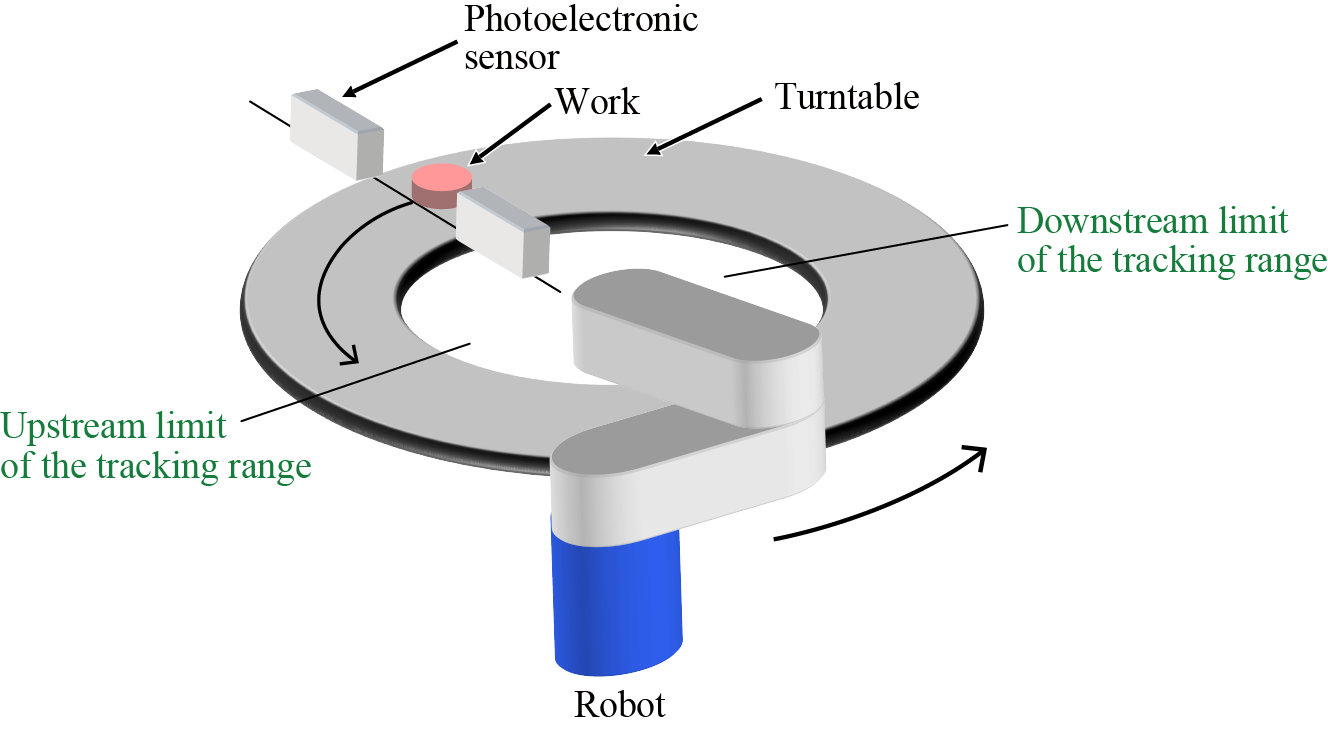
- Calibration point on upstream limit
- This is a point registered at the conveyor calibration to delimit the upstream limit of the tracking range.
This is a center position of a robot flange viewed from the base coordinate system.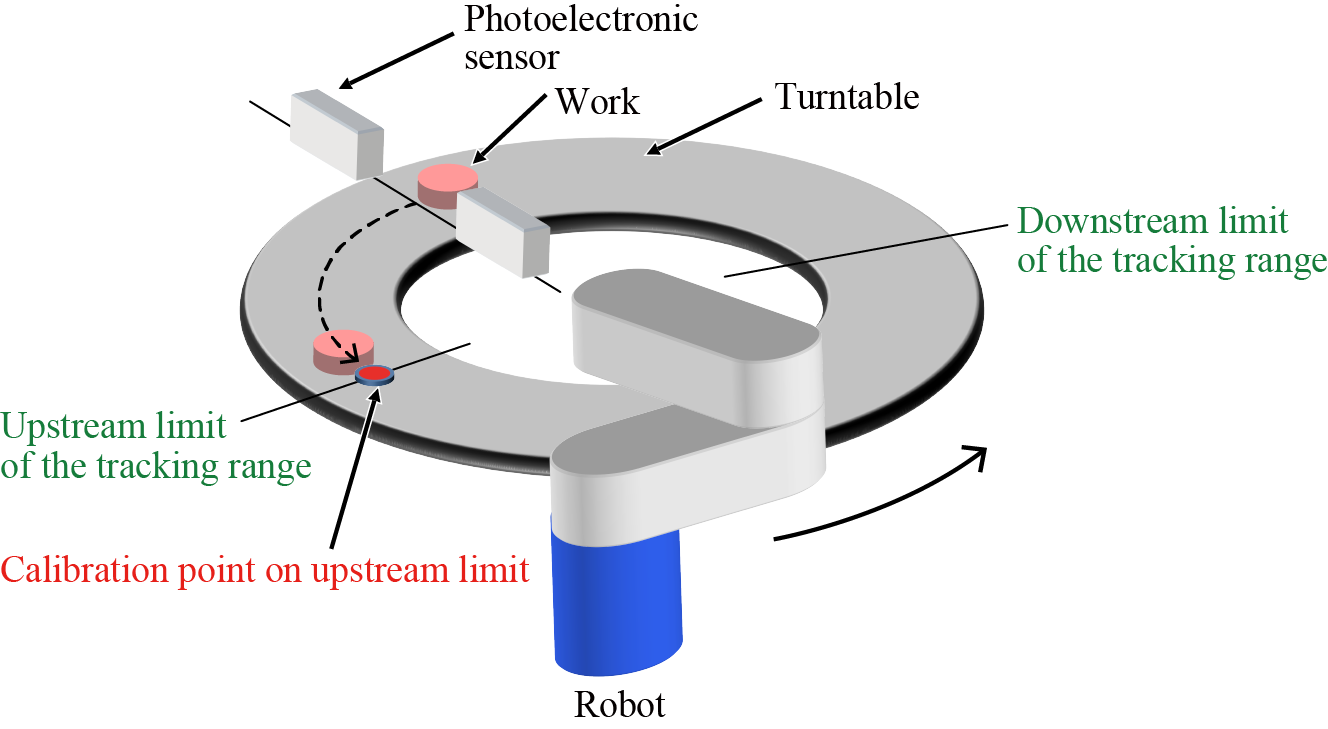
- Calibration point on downstream limit
- This is a point registered at the conveyor calibration to delimit the downstream limit of the tracking range.
This is a center position of a robot flange viewed from the base coordinate system.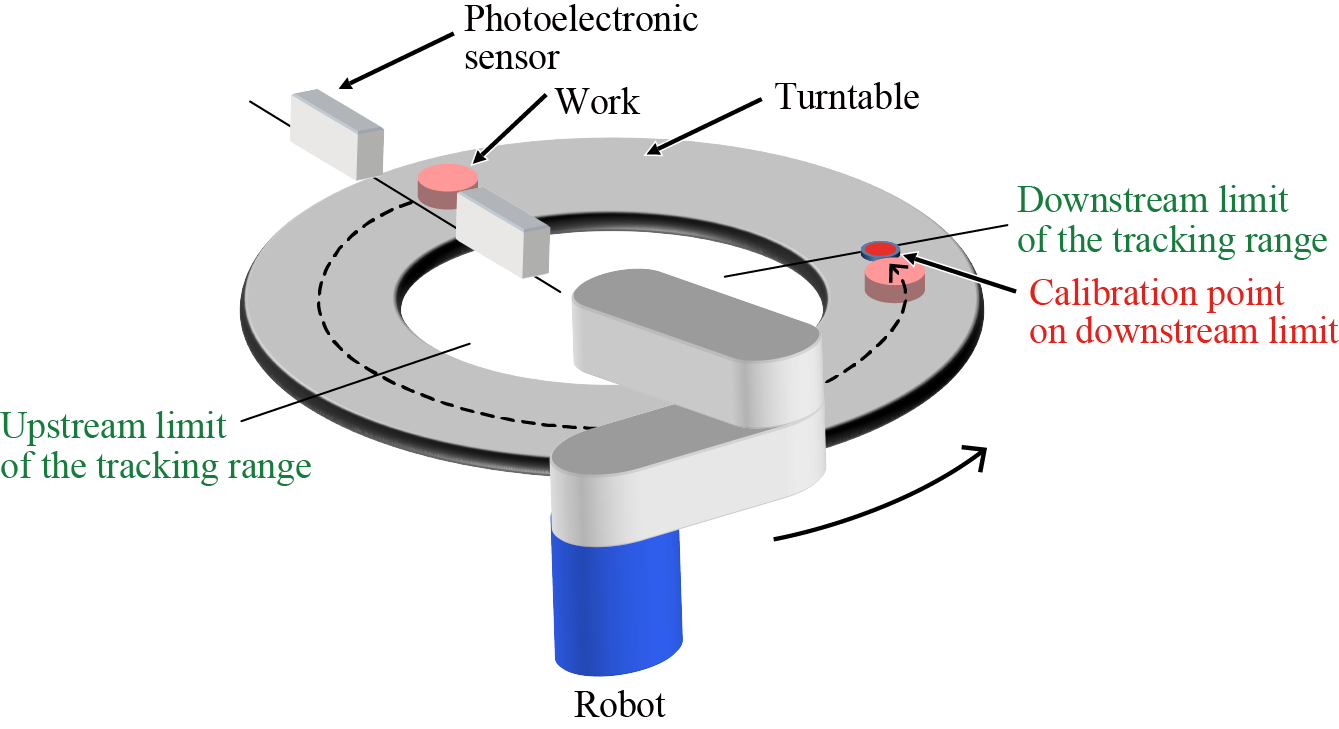
- Conveyor reference position
- This is a midpoint(X,Y,Z) between the calibration point on upstream limit and the calibration point on downstream limit.
As the calibration point on upstream and/or downstream limit changes, this position changes together.
This is a center position of a robot flange viewed from the base coordinate system.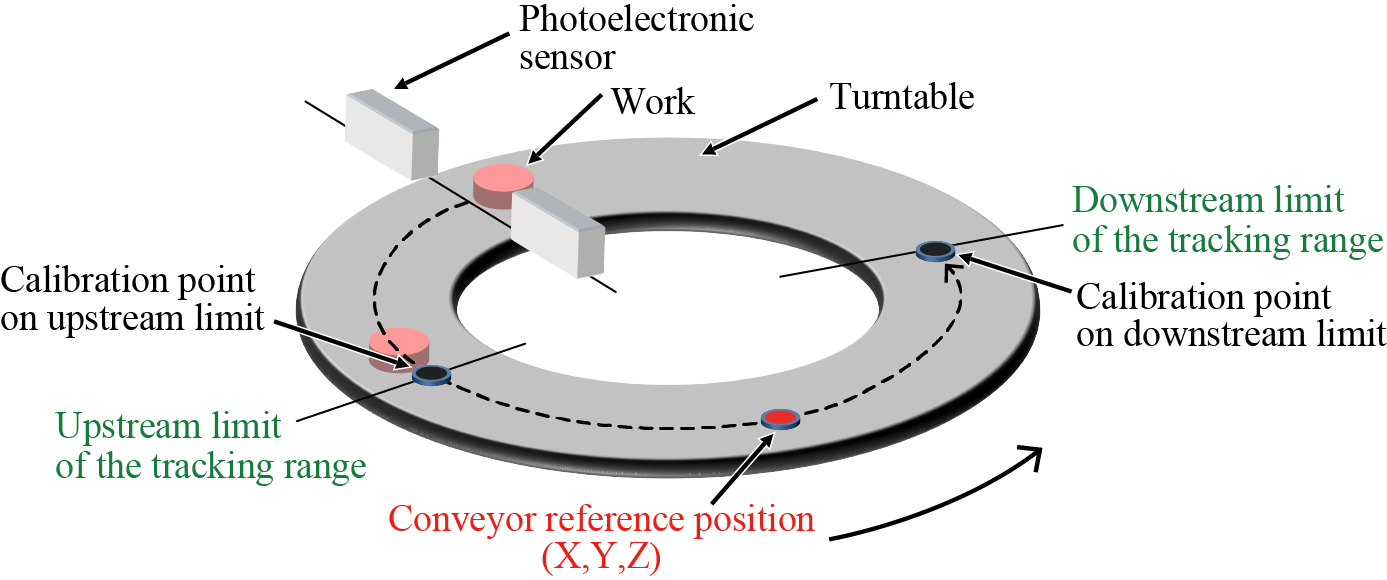
- Default posture of holding the work
- This is the posture (Rx, Ry, Rz) of position type that goes and holds a workpiece when operating the circular tracking.
This is the posture that those position and posture registered, when teaching of Calibration point on upstream limit , have been rotated to the conveyor reference coordinate around the conveyor axis.
When Upstream limit of the tracking range and/or Downstream limit of the tracking range changes, the posture changes together.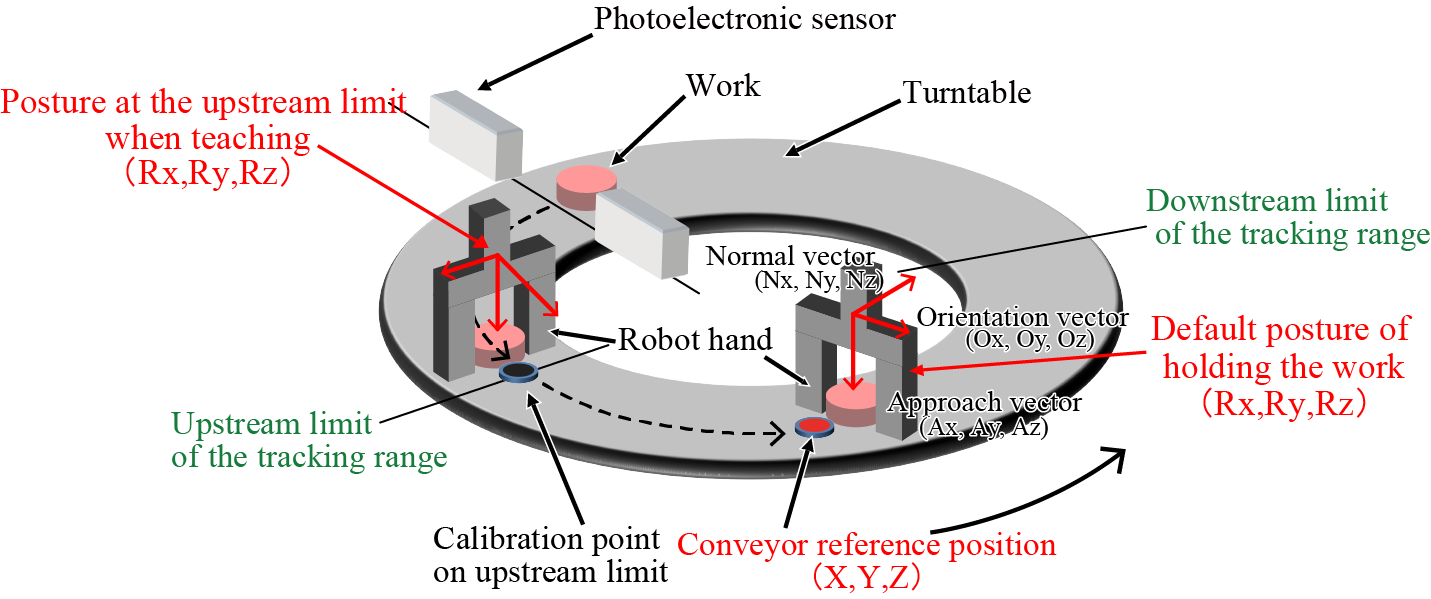
- Conveyor Reference Coordinate
- This consists of the conveyor reference position and the default posture of holding the work. It is position type data.
- Calibration
- In the circular tracking of RC8 series, calibration means measuring the exact positional relationship between the turntable, sensor (vision sensor), and robot. Specifically, it refers to executing the conveyor calibration, sensor calibration (at the time of sensor tracking), and camera calibration (at the time of vision tracking).
- Conveyor calibration
- In the circular tracking of RC8 series, conveyor calibration means measuring the exact positional relationship between the turntable and robot. Specifically, it means measuring the following parameters.
| Parameter name | Description |
|---|---|
| Conveyor CALDATA(X, Y) | Rotating angle around the Z axis of the base coordinate that shows the direction of rotary axis of the turntable [rad] |
| Conveyor CALDATA(Z) | Inclination seen from the XY plane of the base coordinate that shows the direction of rotary axis of the turntable [rad] |
| Conveyor Feed Rate | Amount of turntable movement per one rotation of encoder [deg/rev] |
| Encoder Rotation Direction | Rotational direction of encoder when the turntable is moved from upstream to the downstream (1: Normal, -1: Reverse) |
| Parameter name | Description |
|---|---|
| Upstream limit of the Tracking range | Once a workpiece passes this limit, a robot starts the catch-up motion. [mm] |
| Downstream limit of the Tracking range | Once a workpiece reaches this limit, robot stops the catch-up motion and starts deceleration. [mm] |
| Parameter name | Description |
|---|---|
| Conveyor Reference Coordinate X | Midpoint X between the calibration point on upstream limit and the calibration point on downstream limit [mm] |
| Conveyor Reference Coordinate Y | Midpoint Y between the calibration point on upstream limit and the calibration point on downstream limit [mm] |
| Conveyor Reference Coordinate Z | Midpoint Z between the calibration point on upstream limit and the calibration point on downstream limit [mm] |
- Sensor calibration
- In the circular tracking of RC8 series, sensor calibration means measuring the exact positional relationship between the sensor and robot. Concretely to say, it means the measurement of the following parameters.
| Parameter name | Description |
|---|---|
| Conveyor Reference Coordinate RX | RX of default posture of holding the work [deg] |
| Conveyor Reference Coordinate RY | RY of default posture of holding the work [deg] |
| Conveyor Reference Coordinate RZ | RZ of default posture of holding the work [deg] |
- Camera parameter
- In the circular tracking of RC8 series, camera parameter means the parameter which converts the image coordinates of vision sensor to the position seen from the base coordinates of the robot. Concretely to say, it means the following parameters.
| Parameter name | Description |
|---|---|
| CALDATA(00) | Nx for the Homogeneous Translation Type |
| CALDATA(01) | Ox for the Homogeneous Translation Type |
| CALDATA(02) | Ax for the Homogeneous Translation Type |
| CALDATA(03) | Vision sensor detection position X [mm] |
| CALDATA(10) | Ny for the Homogeneous Translation Type |
| CALDATA(11) | Oy for the Homogeneous Translation Type |
| CALDATA(12) | Ay for the Homogeneous Translation Type |
| CALDATA(13) | Vision sensor detection position Y [mm] |
| CALDATA(20) | Nz for the Homogeneous Translation Type |
| CALDATA(21) | Oz for the Homogeneous Translation Type |
| CALDATA(22) | Az for the Homogeneous Translation Type |
| CALDATA(23) | Vision sensor detection position Z [mm] |
- Camera calibration
- In the circular tracking of RC8 series, camera calibration means measuring the exact positional relationship between the vision sensor and robot. Concretely to say, it means the measurement of the camera parameter and following parameters.
| Parameter name | Description |
|---|---|
| Conveyor Reference Coordinate RX | RX of default posture of holding the work [deg] |
| Conveyor Reference Coordinate RY | RY of default posture of holding the work [deg] |
| Conveyor Reference Coordinate RZ | RZ of default posture of holding the work [deg] |
- Sensor detection position
- This is the workpiece position when it is detected by the line sensor, viewed from the robot coordinate system (X, Y, Z).
This position is as follows. In the sensor calibration, teaching of the position of calibration point on upstream limit is executed and moved back in the opposite of the conveyor vector direction.
This is a center position of a robot flange viewed from the base coordinate system.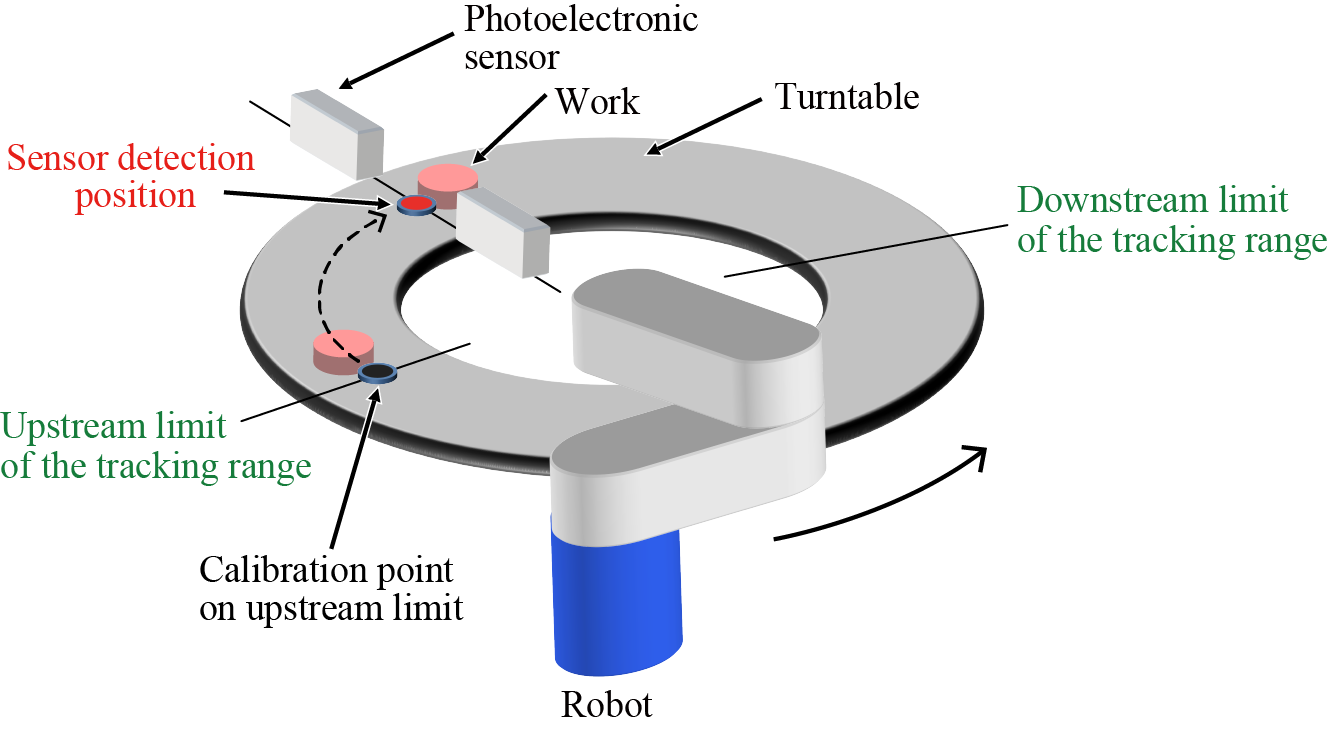
- Coordinate of Zero point
- Reference point on the image coordinate which is used to define the vision sensor detection position. The image coordinate of the first point among three reference points taught at the camera calibration is specified.
- Vision sensor detection position
- This is the workpiece position on the coordinate of zero point when it is detected by the vision sensor, viewed from the robot coordinate system (X, Y, Z).
This is a center position of a robot flange viewed from the base coordinate system.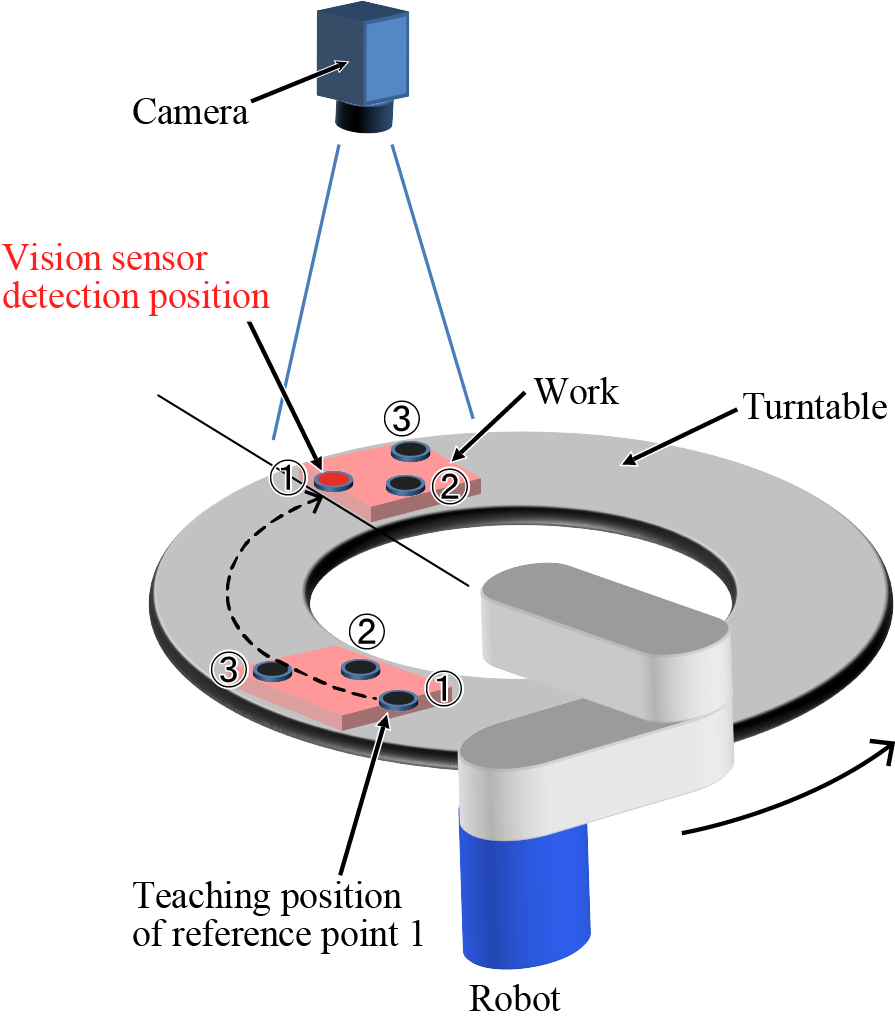
- Vision sensor detection coordinates
- Vision sensor detection coordinates consist of image coordinates (x- and y-coordinates expressed in pixel) and workpiece's attitude angle θ(expressed in degree).
This is expressed by a variant type data array with three elements that stores x, y, and θ in this order. Each elements are expressed by single precision real type data.
- Tracking start range
- Tracking start range is a position that the upstream limit of the tracking range is offset to the upstream direction in specified distance.
In the tracking buffer, work data that locates downstream than this range is counted as possible tracking-target work.
By setting the tracking start range, the system enables to recognize a workpiece that is moved into the tracking range while the robot moves from the waiting position to the upstream limit of the tracking range, as a tracking target work.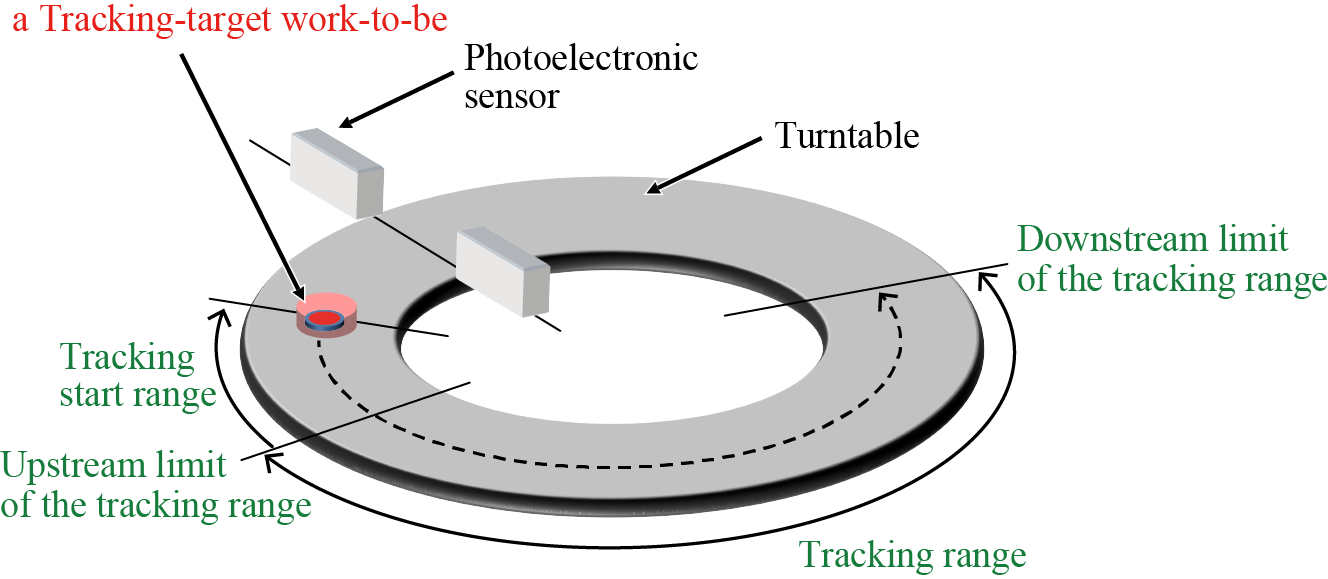
ID : 2856