
ID : 3133
TrackAbsApproach
Function
With the catch-up motion, perform a robot task motion that moves a robot arm to the approach position which is apart from the reference position by specified distance.
This command is available in Ver.2.5.* or higher.
Syntax
TrackAbsApproach Motion interpolation, Reference position, Approach length [, Motion option]
Guaranteed Entry
- Motion interpolation
- Designate a motion interpolation method: "P"/"PTP" for PTP interpolation motion, or "L" for CP interpolation motion.
- Reference position
- Select from Position Type data, Homogeneous Translation Type data.
- Approach length
- Designate an approach length by single precision real number type data. Target position option can be added to the approach length.
- Motion option
- A motion option can be specified.
Description
With the catch-up motion, perform a robot task motion that moves a robot arm to the approach position which is apart from the reference position by specified distance. To execute this command, the task must acquire the axis control of robot.
In the conveyor tracking, the posture of the robot's end-effector at the catch-up motion or at the robot task motion is specified by the second argument Reference position and the given posture is kept during such motion.
In the circular tracking, the end-effector rotates by the rotation angle of the turntable from the start timing of this command to the current time. The posture to be rotated is the posture in the position which is specified in the second argument Reference position.
Also, in the circular tracking, the robot posture can be kept as the posture in the position where the second argument Reference position specifies.
In this case, change the control method of the tool-end with TrackStart command. For details, refer to the guaranteed entry of TrackStart command, "Option setting".
For details about the tool-end posture, refer to "Types of tool-end posture control".
Related Terms
Approach, TrackAbsMove, TrackAbsMove S, TrackDepart, TrackStart, TrackStop, Commands for Conveyor Tracking
Attention
- This command is dedicated for conveyor and circular tracking.
- This command is available only when it is written between TrackStart and TrackStop.
-
Note that the external speed limit and internal speed limit only affect "Approach" motion that is the robot task motion.
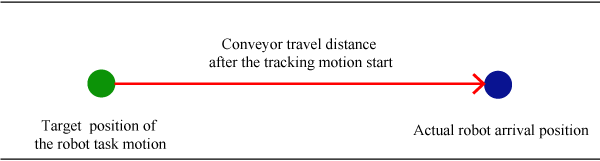
These limits do not affect the catch-up motion. - Unlike "Approach" motion, this command does not move a robot arm to the static target position specified by arguments.
The actual robot arrival position will be the position where the target position of the robot task motion is offset by the conveyor travel distance from the start and end of the tracking motion. This offset will be reset by executing TrackStop.
Example
TakeArm Keep = 0
Do
Move P, P0 'Move to the waiting position.
Wait IO[10] = On 'Wait until the operation target workpiece passes through the motion start position.
TrackStart 1, 1 'Start the tracking mode.
TrackAbsApproach P, P10, 30 'Execute the tracking motion to pursue the above of P10 position.
TrackAbsMove L, P10 'Execute the tracking motion to execute a robot task motion for P10 position.
TrackAbsMove L, P11 'Execute the tracking motion to execute a robot task motion for P11 position.
TrackAbsMove L, P12 'Execute the tracking motion to execute a robot task motion for P12 position.
TrackDepart L, 30 'Execute the tracking motion to execute a robot task motion to leave the designated position.
TrackStop 'End of tracking mode.
Loop Until IO[128] = On
ID : 3133