
ID : 5261
Preparation for Online Monitor
Run the program, which you have created on a PC and uploaded to the robot controller, in machine lock in order to simulate the robot motion on the PC screen.
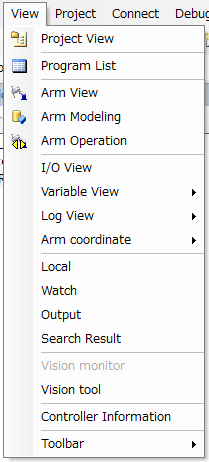
Opening an Arm 3D View
Choose View | Arm View to display the Arm view window where the simulated robot images appear.
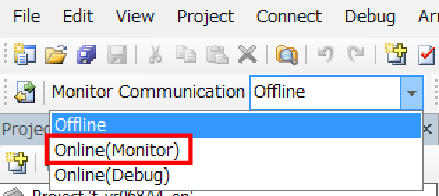
Monitoring the Robot Controller from WINCAPSIII
Choose Connect | Motor Communication | Online (Monitor) to connect WINCAPSIII to the robot controller and display its internal data.
Placing the Robot Controller in Machine Lock
You will now place the robot controller in machine lock. This enables you to simulate the programmed robot motion on the PC screen without actually running the robot.
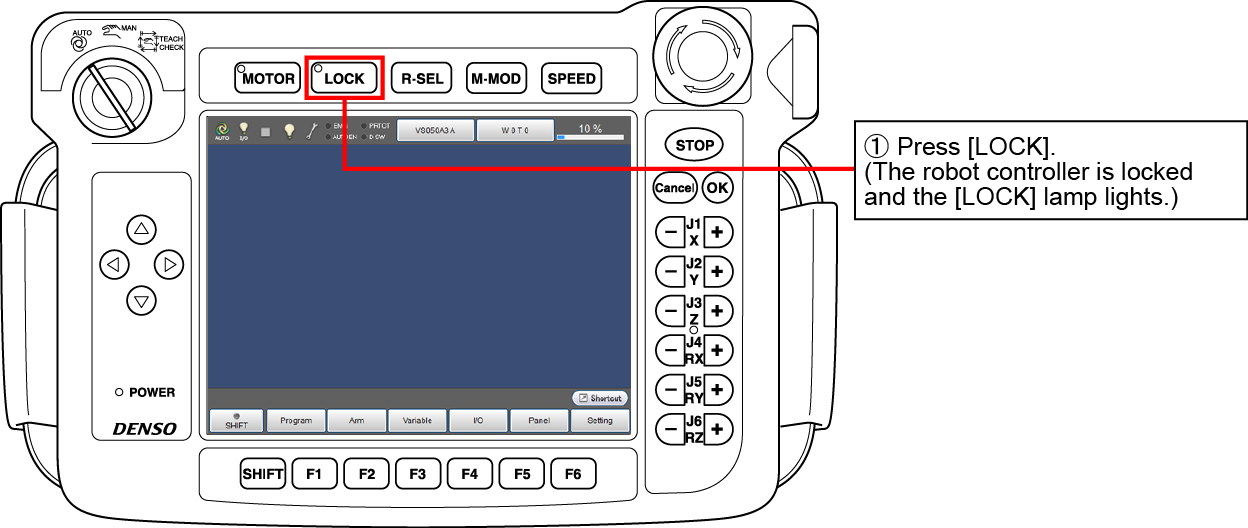
Before placing the robot controller in machine lock, ensure that the motor power is OFF; that is, check that the [MOTOR] lamp is off.
If the machine is locked, you may restrict I/O output.
For details, refer to "Displaying Auxiliary Functions Menu (I/O)" of "TEACH PENDANT OPERATION GUIDE".
The dummy input icon on the status bar changes according to the I/O output restriction condition.
 : No I/O output restricted
: No I/O output restricted  : I/O output restricted
: I/O output restricted
ID : 5261