
ID : 5610
Specifications and Variations
| Item | Specification | ||||
|---|---|---|---|---|---|
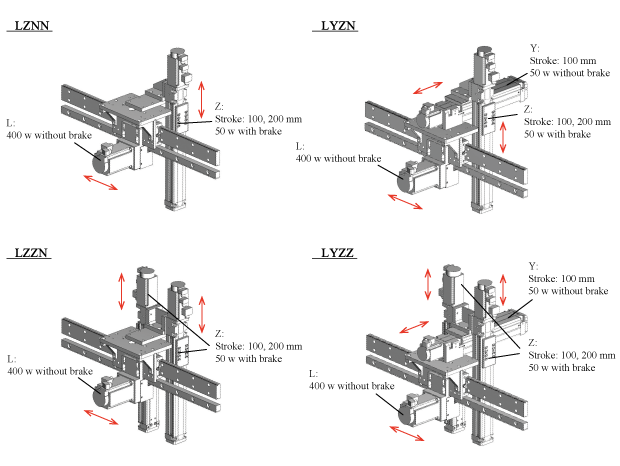
| Robot type | LZNN | LZZN | LYZN | LYZZ | |
| Axis operation stroke | J1 | 600 to 12,000 mm | |||
| J2 | 100, 200 mm | 100 mm | |||
| J3 | - | 100, 200 mm | |||
| J4 | - | - | - | 100, 200 mm | |
| Maximum payload | 5 kg /Z * | ||||
| Maximum speed | J1 | 2 m/s | |||
| J2 | 500 mm/s | ||||
| J3 | - | 500 mm/s | |||
| J4 | - | - | - | 500 mm/s | |
| Position repeatability | L: ±0.05 mm Y, Z: ±0.02 mm | ||||
| Brake | J2: With brake | J2, 3: With brake | J3: With brake | J3, 4: With brake | |
| Weight | 7 kg | 9 kg | 10 kg | 12 kg | |
| Item | Specification | ||||
|---|---|---|---|---|---|
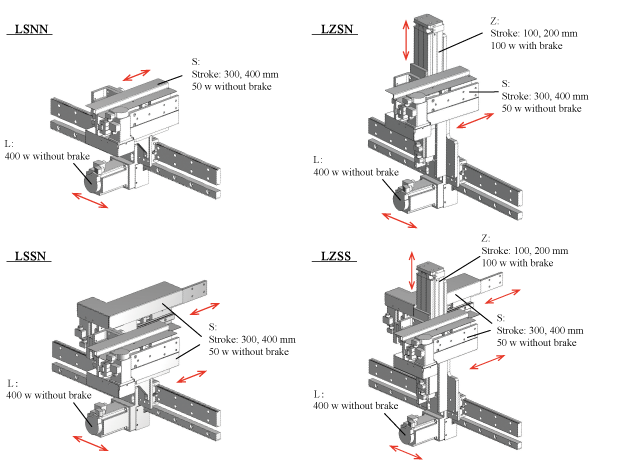
| Robot type | LSNN | LSSN | LZSN | LZSS | |
| Axis operation stroke | J1 | 600 to 12,000 mm | |||
| J2 | 300, 400 mm | 100, 200 mm | |||
| J3 | - | 300, 400 mm | |||
| J4 | - | - | - | 300, 400 mm | |
| Maximum payload | 3 kg/S (2kg/S when S axis is 400 mm) *1 | ||||
| Maximum speed | J1 | 2 m/s | |||
| J2 | 1000 mm/s | 500 mm/s | |||
| J3 | - | 1000 mm/s | |||
| J4 | - | - | - | 1000 mm/s | |
| Position repeatability | L, S:±0.05 mm Z:±0.02 mm | ||||
| Brake | - | J2: With brake | |||
| Weight | 9 kg | 12 kg | 13 kg | 16 kg | |
*1 Check the range of the center of gravity with "Allowable range for the center of gravity of the payload (PDF:251KB)". If the center of gravity locates outside of the allowable range, reduce the weight.
Variations
The following figures show variations.
There is no specified installation direction for the cableveyor.
ID : 5610