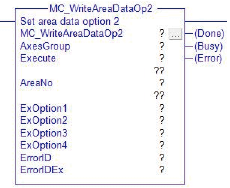
MC_WriteAreaDataOp2
To specify the options of specified detection area, such as exteded-joint.
| Graphic expression |
AOI category |
 |
Non motion |
Input and Output Variable
| Variable name |
Data type |
Valid range |
Conditions for Input and Output |
| AxesGroup |
eRC_AxesGroup |
- |
- Robot group
- Specify a robot variable (structured type data : eRC_AxesGroup) of user-defined type.
|
| ExOption1 |
Array[0..2] of Real |
REAL[0] |
5 to 8 |
For input |
| REAL[1] |
- |
| REAL[2] |
0 or larger |
- Exteded-joint 1 option 1 (Axis number)
- Specify the number of extended-joint.
- Exteded-joint 1 option 2 (Position)
- Specify the position to detect.
- Exteded-joint 1 option 3 (Error range)
- Designate tolerable error range (angle). Unit is degree.
When "-1" is entered, figure is not checked.
|
| ExOption2 |
Array[0..2] of Real |
REAL[0] |
5 to 8 |
For input |
| REAL[1] |
- |
| REAL[2] |
0 or larger |
- Exteded-joint 2 option 1 (Axis number)
- Specify the number of extended-joint.
- Exteded-joint 2 option 2 (Position)
- Specify the position to detect.
- Exteded-joint 2 option 3 (Error range)
- Designate tolerable error range (angle). Unit is degree.
When "-1" is entered, figure is not checked.
|
| ExOption3 |
Array[0..2] of Real |
REAL[0] |
5 to 8 |
For input |
| REAL[1] |
- |
| REAL[2] |
0 or larger |
- Exteded-joint 3 option 1 (Axis number)
- Specify the number of extended-joint.
- Exteded-joint 3 option 2 (Position)
- Specify the position to detect.
- Exteded-joint 3 option 3 (Error range)
- Designate tolerable error range (angle). Unit is degree.
When "-1" is entered, figure is not checked.
|
| ExOption4 |
Array[0..2] of Real |
REAL[0] |
5 to 8 |
For input |
| REAL[1] |
- |
| REAL[2] |
0 or larger |
- Exteded-joint 4 option 1 (Axis number)
- Specify the number of extended-joint.
- Exteded-joint 4 option 2 (Position)
- Specify the position to detect.
- Exteded-joint 4 option 3 (Error range)
- Designate tolerable error range (angle). Unit is degree.
When "-1" is entered, figure is not checked.
|
Input Variable
| Variable name |
Data type |
Valid range |
| Execute |
Boolean |
|
- Execution start
- When the variable is changed from FALSE to TRUE, this AOI is executed.
|
| AreaNo |
Integer |
0 to 31 |
- Area number
- Specify an area number.
|
Output Variable
| Variable name |
Data type / Description |
| Done |
Boolean |
- Execution completion confirmation
- TRUE : This AOI execution is completed.
FALSE : This AOI execution is not completed.
|
| Busy |
Boolean |
- Processing status of this AOI
- TRUE : Being executed.
FALSE : Not being executed.
|
| Error |
Boolean |
- Error presence
- TRUE: This AOI ended abnormally.
FALSE : This AOI ended successfully.
|
| ErrorID |
Integer |
- Error location
- 2800 : The error occurred in the PLC program.
2801 : The error occurred in the robot controller.
|
| ErrorIDEx |
DInt |
- Error Code
- This is a number to identify the error description.
For details, refer to "Error code list".
|
Function Description
-
Attention
If you the change work coordinates during area interference (area check) function enabled state, depending on the system, it will take up to 10ms before the new work coordinate is reflected into the interference check area judgment.
To use the new work coordinate for the area interference check without fail, before you change the work coordinate, set the robot so that the area interference does not occur (such as stop the robot motion), wait until the new work coordinate is applied to the system, and restart the robot.
