
ID : 7407
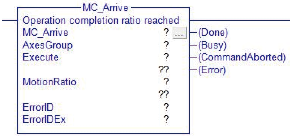
MC_Arrive
To let the task stand-by until the motion complete rate specified by the currently-active motion instruction is reached.
| Graphic expression | AOI category |
|---|---|
 |
Motion |
Input and Output Variable
| Variable name | Data type | Valid range | Conditions for Input and Output |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
Input Variable
| Variable name | Data type | Valid range |
|---|---|---|
| Execute | Boolean |
|
|
||
| MotionRatio | Real | 0 < motion rate ≤ 100 |
|
||
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| CommandAborted | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Integer |
|
|
| ErrorIDEx | DInt |
|
Function Description
When an Arrive instruction is executed during execution of motion instruction of own task, the program is suspended until the current position (encoder value) achieves the designated motion ratio.
Attention
To execute this AOI, AOI with the AOI category "Motion" needs to be made executable.
To make AOI with the AOI category "Motion" executable, use the AOI "MC_Power".
ID : 7407