
ID : 7587
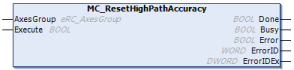
MC_ResetHighPathAccuracy
To disable the high tracing control function.
| Graphic expression | FB category |
|---|---|
 |
Motion |
Input and Output Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | No | ||
|
||||
Input Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| Execute | Boolean |
|
FALSE | No |
|
||||
(*) : For some Variable, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
Function Description
The high precision control function is used to improve the precision of motion paths of the robot. The precision of motion paths can be improved particularly in the high-speed arc motion and free curve interpolation control. The high precision control function provides stabilized robot motions in sealing and other work.
Attention
To execute this FB, FB with the FB category "Motion" needs to be made executable.
To make FB with the FB category "Motion" executable, use the FB "MC_Power".
ID : 7587