
ID : 7626
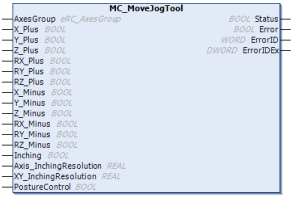
MC_MoveJogTool
To operate a robot with Tool mode from TP panel.
| Graphic expression | FB category |
|---|---|
 |
Motion |
Input and Output Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | No | ||
|
||||
Input Variable
| Variable name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| X_Plus | Boolean |
|
FALSE | Yes |
|
||||
| Y_Plus | Boolean |
|
FALSE | Yes |
|
||||
| Z_Plus | Boolean |
|
FALSE | Yes |
|
||||
| RX_Plus | Boolean |
|
FALSE | Yes |
|
||||
| RY_Plus | Boolean |
|
FALSE | Yes |
|
||||
| RZ_Plus | Boolean |
|
FALSE | Yes |
|
||||
| X_Minus | Boolean |
|
FALSE | Yes |
|
||||
| Y_Minus | Boolean |
|
FALSE | Yes |
|
||||
| Z_Minus | Boolean |
|
FALSE | Yes |
|
||||
| RX_Minus | Boolean |
|
FALSE | Yes |
|
||||
| RY_Minus | Boolean |
|
FALSE | Yes |
|
||||
| RZ_Minus | Boolean |
|
FALSE | Yes |
|
||||
| Inching | Boolean |
|
FALSE | Yes |
|
||||
| Axis_InchingResolution | Real | 0.0001 to 0.1 | 0.0004 | Yes |
|
||||
| XY_InchingResolution | Real | 0.01 to 1 | 0.01 | Yes |
|
||||
| PostureControl | Boolean |
|
TRUE | Yes |
|
||||
(*) : For some Variable, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output Variable
| Variable name | Data type / Description |
|---|---|
| Status | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
Function Description
The following figure shows the robot motion in Tool mode.
| 6-axis robot | 4-axis robot |
|---|---|
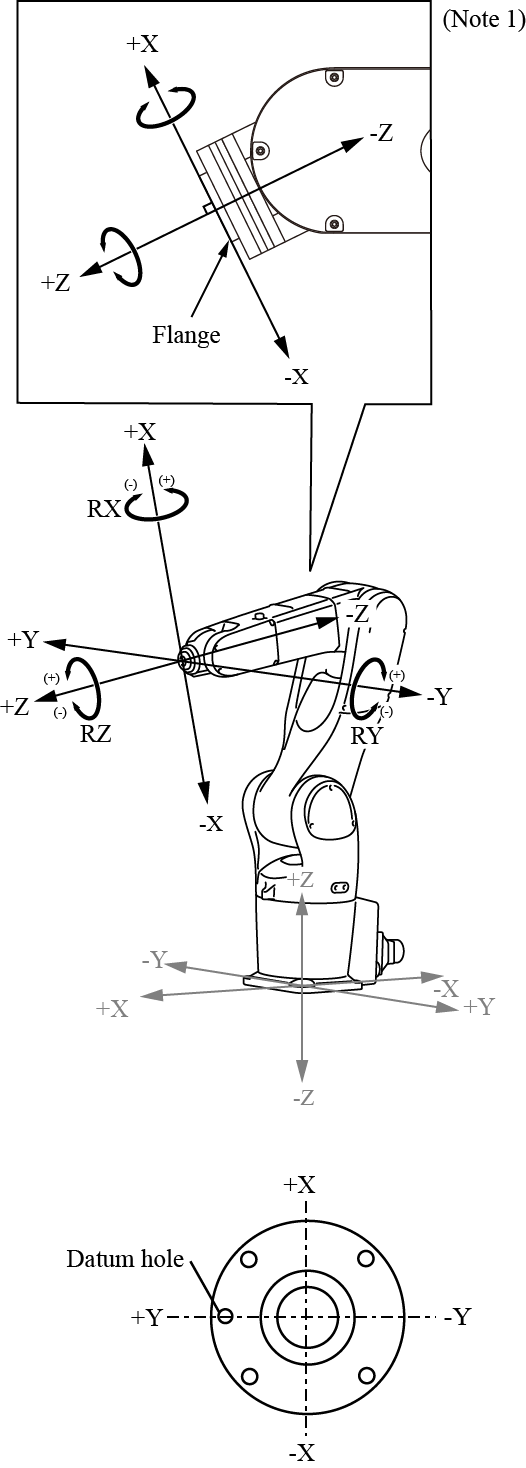 |
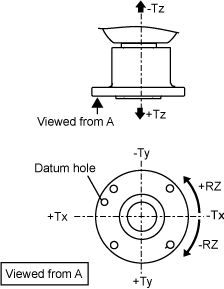 |
| Drives the robot flange linearly along the X-, Y-, and Z-axes of the flange face. | Drives the robot flange linearly along the Cartesian coordinates of the 4th axis. |
Note 1: This figure shows the tool coordinate system when Tool0 is selected. This coordinate system is called mechanical interface coordinate system.
Attention
To execute this FB, FB with the FB category "Motion" needs to be made executable.
To make FB with the FB category "Motion" executable, use the FB "MC_Power".
ID : 7626