
ID : 7720
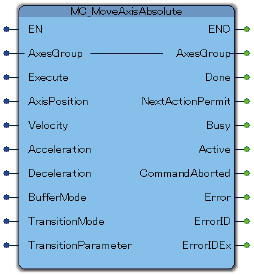
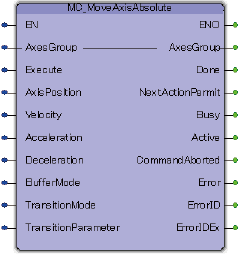
MC_MoveAxisAbsolute
To move the robot to the target position by PTP control. Specify the target position with an axes coordinate system (Joint type).
| Graphic expression | FB category | |
|---|---|---|
| Ver.5.5 | Ver.5.35 | |
 |
 |
Motion |
Input and Output Variable
| Variable name | Data type | Valid range | Default | Omission (*) | |
|---|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | No | |||
|
|||||
Input Variable
| Variable name | Data type | Valid range | Default | Omission (*) | |
|---|---|---|---|---|---|
| Execute | Boolean |
|
FALSE | No | |
|
|||||
| AxisPosition | eRC_Joint | Yes | |||
| Even if the target value is set to an axis that does not exist in the controlled robot, the robot controller ignores the value. For example, if a value is set to the variable "J5" when a four-axis robot is controlled, the robot controller controls the robot by referring to the values of the variables only "J1" to "J4". |
|||||
| Velocity | Real | 0.1 to 100.0 | -1.0 | Yes | |
|
|||||
| Acceleration | Real | 0.0001 to 100.0 | -1.0 | Yes | |
|
|||||
| Deceleration | Real | 0.0001 to 100.0 | -1.0 | Yes | |
|
|||||
| BufferMode | Integer | 0, 1, 6, 7, 8, 9 | 0 | Yes | |
|
|||||
| TransitionMode | Integer | 0, 3, 10, 11 | 0 | Yes | |
|
|||||
| TransitionParameter | Integer | 0 to 32767 | -1 | Yes | |
|
|||||
(*) : For some Variable, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| NextActionPermit | Boolean |
|
|
| Busy | Boolean |
|
|
| Active | Boolean |
|
|
| CommandAborted | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
Function Description
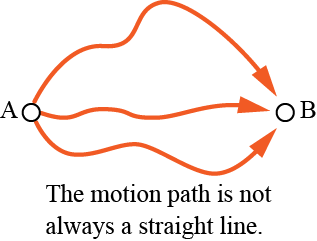
- About PTP control
- PTP (Point to Point) can be defined as the movement from one point to another point. The path on which the robot moves depends on the robot posture and is not always a straight line.
The figure below shows an example of motion by PTP control. -
Attention
To execute this FB, FB with the FB category "Motion" needs to be made executable.
To make FB with the FB category "Motion" executable, use the FB "MC_Power".
ID : 7720