Robot-Related Safety Standards Compliance
To comply with ISO10218 (safety-related standard for robots) during operations with cooperative control function, follow the conditions below.
-
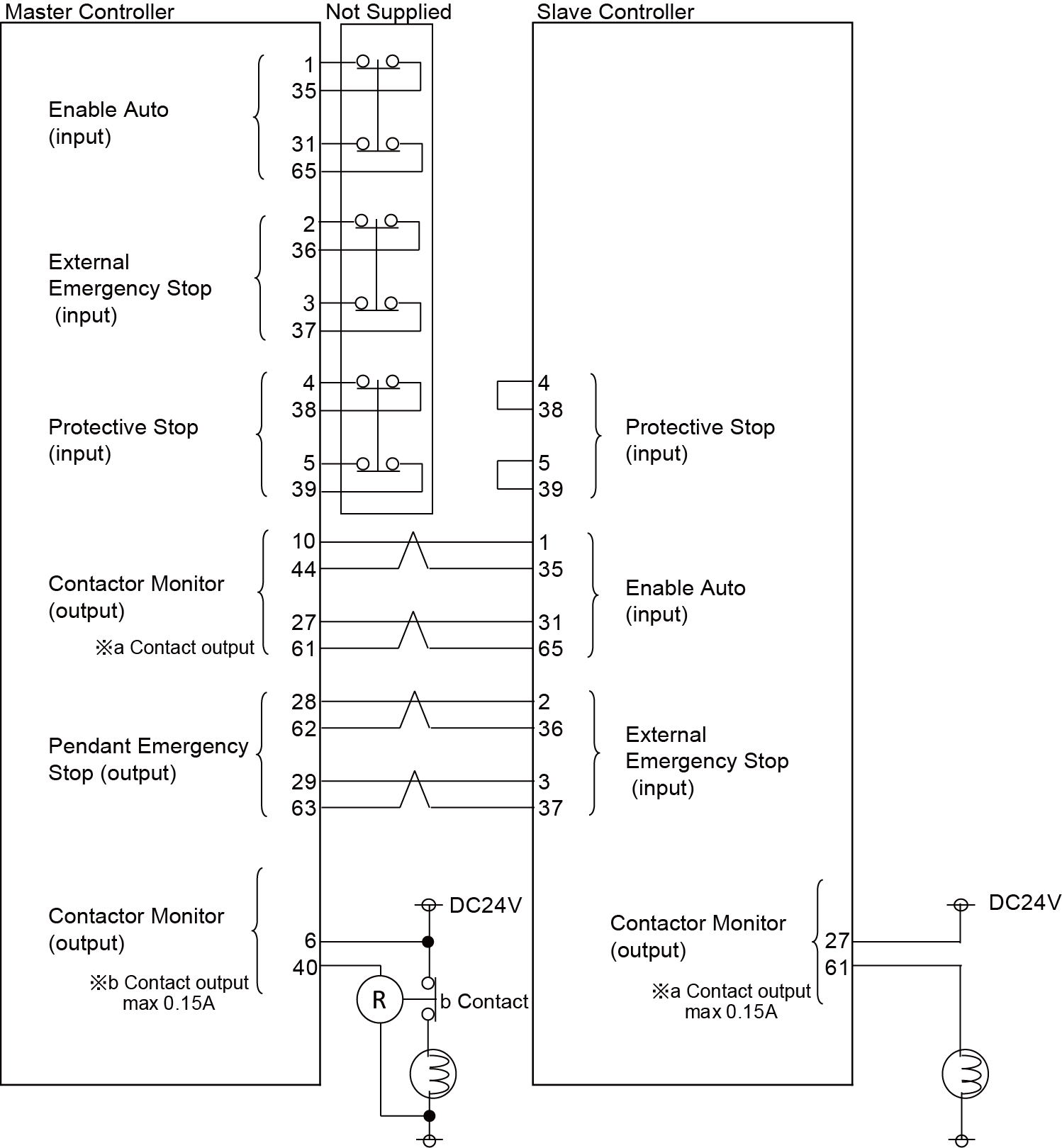
The master and slave controllers shall be the standard type controller, and all safety-related wirings are properly connected.
For details, refer to the "Connections for Safety-Related Circuits" of I/O Wirings. - Any teach pendants are not connected to the slave controllers.
- Robots in motion must be specified clearly.
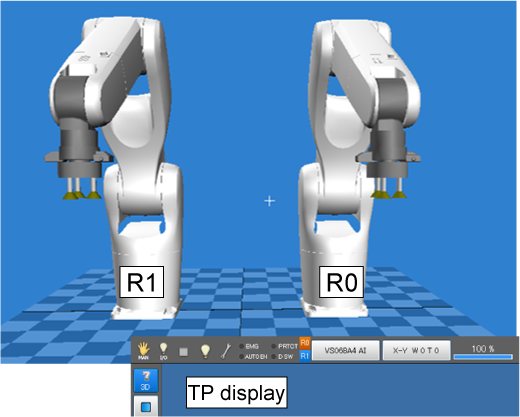
Specifying a Robot in Motion
Placing a Marking on the Robot
To clearly specify which robot corresponds with R0 or R1, specify a robot name on the robot surface.
Example: Place a marking on a robot
Indicating Motor ON/OFF Status
Clearly specify the motor ON/OFF status.
Example: Turn on a lamp by contactor signals.

Both the master and slave controllers must equip this indicator.
Example of the Light Wiring Diagram for the Standard Specification