
ID : 6955
Escaping from the Interference Check Area
When Entering the Interference Check Area
If the interference check setting is 1 or 2, an error will be issued once a robot enters the interference check area. (Error code: 0x83201281 to 0x832012A0, Message:TCP is interfering with Area*)
If the interference check setting is 2, the robot may escape from the interference check area by switching the operation mode to Direct mode and then move the COBOTTA arm by operator’s hand.
Escaping Procedure
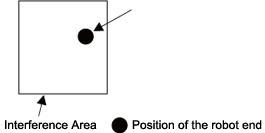
1
Error will occur when the robot enters the interference area.
2
Change the operation mode to the Direct mode.
3
Move the COBOTTA arm to the outside of the interference area by operator’s hands.
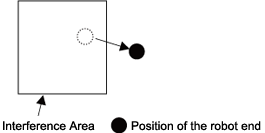
- Make sure to move the COBOTTA arm in the direction away from the interference point.
- Error will be issued once a robot enters the interference check area again. (Error code: 0x83201281 to 0x832012A0, Message:TCP is interfering with Area*)
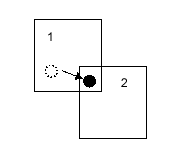
- If the areas of interference overlap, as shown in the figure below, error occurs first upon the robot end starting within the area 1 enters in the area 2. However, this can be avoided by aid of the method given above.
When Leaving the Interference Check Area
The measures of this case is the same as that of "When entering the interference check area" mentioned above.
If the interference check setting is 4 or 5, an error will be issued once a robot leaves the interference check area. (Error code: 0x83201281 to 0x832012A0, Message:TCP is interfering with Area*)
If the interference check setting is "5", the robot may escape from the interference area. The way of this operation is the same as setting "2" to "When entering the interference check area".
For about the way of escape from the interference check, refer to the description above. Note that the motion directions (inner/outer) are reversed.
ID : 6955