
ID : 6962
Start and Stop of Monitoring
Users can start and stop the monitoring with the Remote TP, Virtual TP, or command.
Start of Monitoring on COBOTTA Startup
When the parameter [366: Virtual fence setting] is enabled, monitoring is started on COBOTTA startup.
- When it is not enabled, monitoring is not started from the Remote TP, Virtual TP, or command.
- If you have changed the value of the parameter, reboot the COBOTTA.
Start/Stop of Monitoring with the Remote TP/Virtual TP
To start/stop monitoring, you should enable the parameter [366: Virtual fence setting].
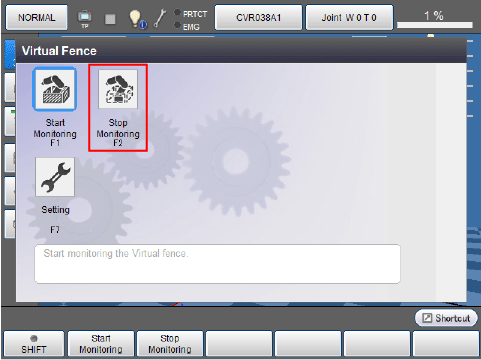
Stop the Monitoring
Operation path : Basic screen - [F2 Arm] - [F6 Aux] - [F2 Collision/Interference] - [F2 Virtual fence]
To stop the monitoring, press [F2 Stop Monitoring].
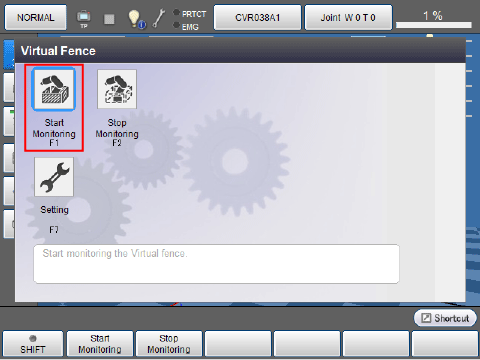
Start the Monitoring
To start the monitoring, press [F1 Start Monitoring].
Start/Stop of Monitoring with the Command
Use the VirtualFence command to start/stop monitoring. For details, refer to "VirtualFence".
How to Handle Interference
If a monitoring target is interfered, use the Remote TP/Virtual TP to temporarily stop monitoring a model, manually evacuate the robot, and then resume the monitoring with the Remote TP/Virtual TP.
ID : 6962