
ID : 7957
Step Stop (All Tasks) (Input)
Function
Input this signal to step-stop the program being executed from the external device. All tasks will be step-stopped.
Input Conditions and Operation
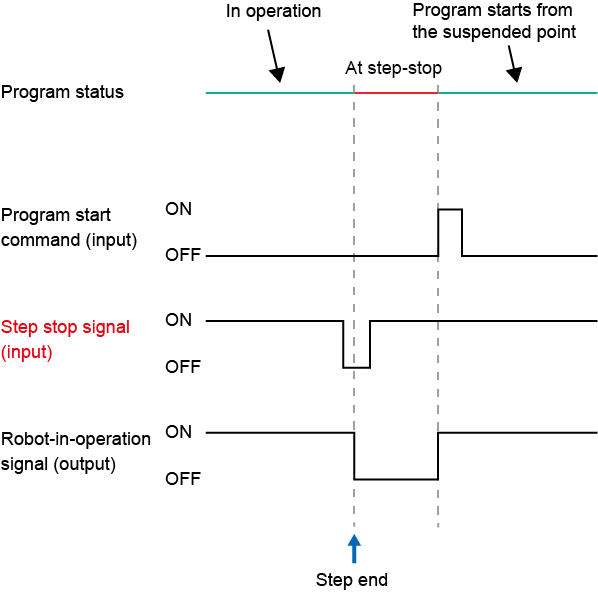
If the state of this signal is changed from on to off, the robot will stop all tasks as soon as the ongoing step is completed, and the "Robot-in-operation (output)" signal will be turned off. The suspended program will resume by I/O command "Program start" input.
For resuming the program after an step stop, refer to, "Program Operation(0001)".
Timing Chart
The following shows the status change when a suspended program is resumed by an I/O command.
ID : 7957