
ID : 10207
Safety I/O Wiring
This section describes the details of the Safety I/O in the following categories.
Wiring Table
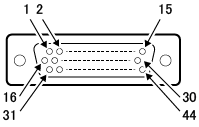
The following shows the correspondence table of the Safety I/O cable terminal number and the line color.
|
Terminal number of connector (viewed from the connector mating face) |
|
|---|
| Terminal number | Name | Wiring pair | Line color |
|---|---|---|---|
| 1 | External emergency stop input 1b-1 | Pair | black |
| 31 | External emergency stop input 1b-2 | pink | |
| 2 | External emergency stop input 2b-1 | Pair | brown |
| 32 | External emergency stop input 2b-2 | pink | |
| 3 | Protective stop input 1-1 | Pair | red |
| 33 | Protective stop input 1-2 | pink | |
| 4 | Protective stop input 2-1 | Pair | orange |
| 34 | Protective stop input 2-2 | pink | |
| 5 | Enable auto input 1-1 | Pair | yellow |
| 35 | Enable auto input 1-2 | pink | |
| 6 | Enable auto input 2-1 | Pair | green |
| 36 | Enable auto input 2-2 | pink | |
| 7 | - | Pair | blue |
| 37 | - | pink | |
| 8 | - | Pair | black |
| 38 | - | gray | |
| 9 | - | Pair | brown |
| 39 | - | gray | |
| 10 | Enabling switch output 1-1 | Pair | red |
| 40 | Enabling switch output 1-2 | gray | |
| 11 | Enabling switch output 2-1 | Pair | orange |
| 41 | Enabling switch output 2-2 | gray | |
| 12 | - | Pair | yellow |
| 42 | - | gray | |
| 13 | Emergency stop output 1b-1 | Pair | green |
| 43 | Emergency stop output 1b-2 | gray | |
| 14 | Emergency stop output 2b-1 | Pair | blue |
| 44 | Emergency stop output 2b-2 | gray | |
| 15 | - | Pair | purple |
| 30 | - | gray | |
| 16 | STO monitor output 1+ | Pair | black |
| 17 | STO monitor output 1- | white | |
| 18 | STO monitor output 2+ | Pair | brown |
| 19 | STO monitor output 2- | white | |
| 20 | STO output 1+ | Pair | red |
| 21 | STO output 1- | white | |
| 22 | STO output 2+ | Pair | orange |
| 23 | STO output 2- | white | |
| 24 | - | Pair | yellow |
| 25 | - | white |
Type of Safety I/O Signals
The following shows the types of Safety I/O signal.
- External Emergency Stop Input
- Protective Stop Input
- Enable Auto Input
- STO Monitor Output
- STO Output
- Emergency Stop Output
- Enabling Switch Output
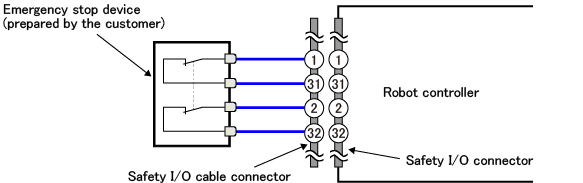
External Emergency Stop Input
To stop a robot.
| Terminal number | Description |
|---|---|
| 1 and 31 (Line 1) |
|
| 2 and 32 (Line 2) |
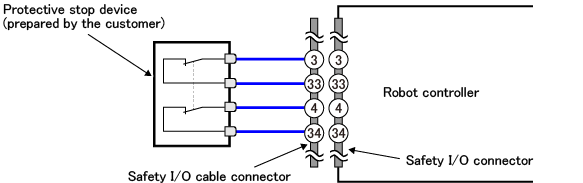
Protective Stop Input
To suspend a robot motion.
| Terminal number | Description |
|---|---|
| 3 and 33 (Line 1) |
|
| 4 and 34 (Line 2) |
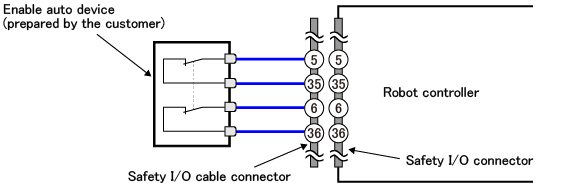
Enable Auto Input
To set the operation mode of the robot controller to the automatic mode.
| Terminal number | Description |
|---|---|
| 5 and 35 (Line 1) |
|
| 6 and 36 (Line 2) |
STO Monitor Output, STO Output
Use this signal to inform an external device of the STO state.
Emergency Stop Output
Use this signal to inform an external device of the emergency stop input state.
Enabling Switch Output
Use this signal to inform an external device of the enabling switch state.
ID : 10207