
ID : 10865
CALSET
What Is CALSET?
Calibrating the relationship between position information recognized by the robot controller and the actual position of the robot arm is called CALSET.
CALSET uses a previously determined axis position where an axis can be secured. It creates calibration data (CALSET data) that matches the actual axis position (CALSET position) with the encoder value. The angle of the CALSET position is saved in the robot controller as a RANG value.
The CALSET data is different on each robot.
CALSET work must be performed when the motor is replaced.
In CALSET work, there are "CALSET" and "Recover CALSET data".
If a motor is changed, execute "CALSET"; and in other cases, execute "Recover CALSET data".
CALSET data should be managed by the customer. Back up the CALSET data periodically, referring to "Backing up Projects".
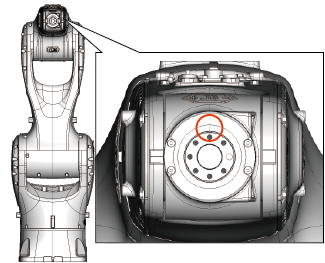
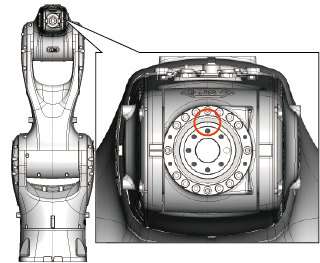
| Axis | CALSET position | ||
|---|---|---|---|
| J1 | 0° | 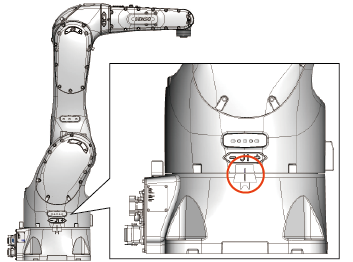 |
|
| J2 | 0° | 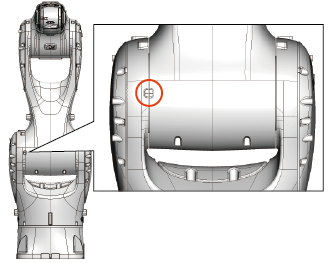 |
|
| J3 | 90° | 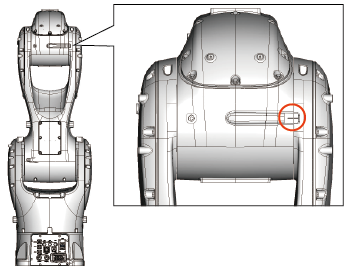 |
|
| J4 | 0° | 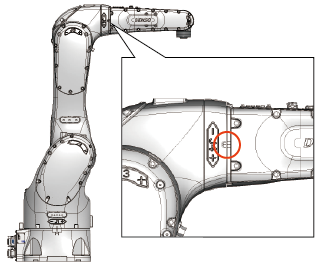 |
|
| J5 | 90° | 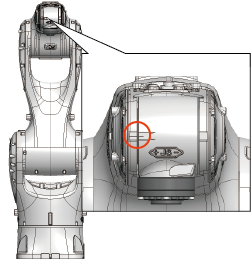 |
|
| J6 | Standard type | 0° |
|
Protected type |
 |
||
CALSET Procedure
1
Release the brake of an axis to be CALSET and move the axis to the CALSET position.
2
Use the smart TP to select CALSET.
Refer to the "CALSET Operation" of Smart TP Operation Guide.
ID : 10865