
ID : 519
Pass Start Displacement
"Pass start displacement" specifies the time to start the next line instruction along the way of a motion by a motion statement toward a target position.
Integer type data are designated in the "@[pass start displacement]" format as a target position option of the motion statement. The distance to the target position is specified in [mm].
E.g.
Move L, @[50] PosA
Move L, PosB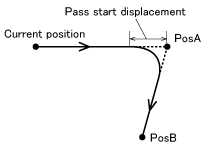
With the above, a travel instruction to PosB of the next line is executed when the robot gets 50 mm to the target position PosA.
The time to execute the next line that can be designated by pass start displacement is from the start of motion deceleration to stopping (when it is confirmed that the encoder value reaches to a target position).
Designation Types of Pass Start Displacement
| Designated value | Motion name | Description |
|---|---|---|
| >0 | Pass motion of position designation |
The next line is executed once the distance between the command position and the target position gets shorter than the designated value. |
| =0 | End motion |
Time when the command position reaches to the target position. |
| =-1 or @P | Pass motion |
The next line is executed once deceleration starts. This may also be described as "@P." |
| =-2 or @E | Encoder value check motion |
The next line is executed once it is confirmed that the encoder value (current position) reaches to the target position. This may also be described as "@E." |
| =-6 or @C | Encoder value check motion(Position and posture of tool end) | Execute the next line when the position and posture of the tool end, which have been coordinate-converted based on the encoder value, has arrived at the target position. This may also be described as "@C."
The positional precision and postural precision, which is used to determine the arrival at the target position, can be changed by means of CrtMotionAllow command. |
As an error may be generated in a path motion of the position designation, the designated value should only be taken as a reference.
Pass Motion of Position Designation Based on the Current Position (encoder value)
If "@a[Pass Start Displacement]" is designated at the "Pass motion of position designation" instead of "@[Pass Start Displacement]", the next line is executed when the distance between the current position (encoder value) and the target position becomes shorter than the designated value.
Pass start displacement is specified by Integer-type data.
Move L, @a[50] P[10]As an error may be generated in a path motion of the position designation, the designated value should only be taken as a reference.
Changing the judgement mode of the Encoder value check motion
If the motion being judged accompanies any vibration, the position may move from the target position due to the remaining vibration, after the judgement of the arrival at the target position by means of the encoder value check motion(@E or @C). To execute the next line after the end of the remaining vibration, change the judgement mode of the encoder value check motion to "1" or "2" (default value is "0"), which is described in Configuration List of FUNCTION GUIDE.
If the judgement mode is set to 1 or 2, the judgement time may take longer. This is because these modes require time to confirm that the remaining vibration attenuate to a specified level.
For details about the configurations, refer to "Configuration List" of FUNCTION GUIDE.
In the Configuration List, following numbers relate to the encoder value check motion.
- No.171: Frange position encoder value check motion judgment mode
- No.172-179: Each axis encoder value check motion judgment mode
- No.180: Frange position encoder value check motion judgment time
- No.181-188: Each axis encoder value check motion judgment time
ID : 519